





【前沿】能走能跳?论外太空探索机器人的新行动方式!

2019年7月4日
在月球上的宇航员更像是跳跃而不是行走。瑞士的spacebok行星探测机器人从宇航员的行动上获得灵感,在欧空局的技术中心进行测试时,他们试着将机器人的四条腿起跳离地。

spacebok是一个四足机器人,由苏黎世ETH和苏黎世ZAW的瑞士学生团队设计和制造。目前正在荷兰ESA的ESEC技术中心使用机器人设备对其进行测试。
Hendrik Kolvenbach和Spacebok
这项工作正在苏黎世ETH机器人系统实验室的博士生Hendrik Kolvenbach的领导下进行,该实验室目前设在ESEC。机器人正被用来研究“动态行走”在低重力环境中四处走动的可能性。

亨德里克解释说:“动态步行不是静态步行,至少有三条腿始终停留在地面上,而是允许所有腿都远离地面的全飞行阶段的步态。动物能利用动态步态是因为它们大脑的效率,而直到现在,控制所需的计算能力和算法任然使它在机器人上的实现显得无比困难。
而对于月球、火星或小行星的低重力环境,像这样的跳跃前进是一种非常有效的方法。
模拟低重力条件
宇航员在月球六分之一重力的情况下,本能地采用跳跃。宇宙飞船在月球引力下可能会上升到2米高,尽管这样的高度会带来新的挑战。一旦它离开地面,腿上的机器人需要稳定下来,才能安全地再次降落——在这一点上,它的行为基本上就像一个微型宇宙飞船,”小组成员亚历山大迪奇说。
“所以我们所做的就是利用常规卫星用来控制其方向的一种方法,叫做反作用轮。它可以被加速和减速,从而在机器人自身引发一个相等和相反的反应,”小组成员菲利普·阿姆解释说。
安装在侧面的机器人
另一位团队成员本杰明·孙补充说:“此外,机器人的腿上还装有弹簧,可以在着陆时储存能量,在跳起时释放能量,大大减少了实现跳跃所需的能量。”
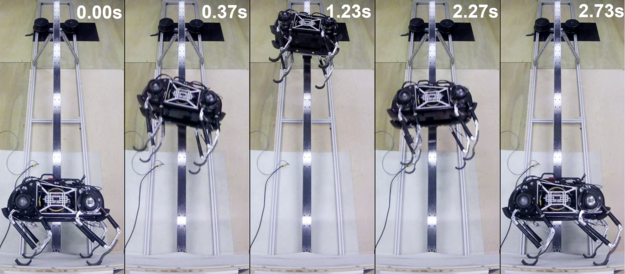
研究小组正在缓慢地增加机器人重复跳跃的高度,目前为止在模拟月球重力条件下,这个高度高达1.3米。
已经建立了模拟各种重力环境的试验台,不仅模拟月球条件,而且模拟小行星的极低重力。重力越低,每个机器人跳跃的飞行阶段就越长,但机器人并不能只追求在空中的跳跃距离,起跳和着陆同样需要有效的控制。
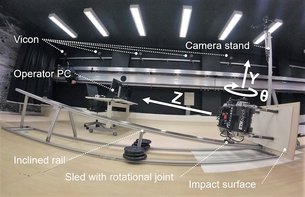
为了模拟小行星消失的低重力,太空梭小组利用荷兰最平坦的地面——一个4.8 x 9米的环氧树脂地面,平滑到0.8毫米的整体平坦度,称为集成技术(轨道)轨道机器人平台,是欧空局轨道机器人的一部分。导航控制实验室。
Pong
spacebok被放置在它的侧面,然后连接到一个自由浮动的平台上,在二维空间中复制零重力条件。当它从墙上跳下来的时候,它的反作用轮允许它在跳的过程中旋转,让它先着地的脚再次落在房间的另一边——就好像它是在沿着一个缩小的低重力表面跳一样。
亨德里克补充道:“测试进行得非常顺利,我们甚至用太空机器人玩了Pong,这是经典的电子游戏。”
太空行走机器人
测试将在更现实的条件下继续进行,例如:跳过障碍物、穿越丘陵地形和其他现实地形,最终才能走出大门。

亨德里克正通过欧空局的网络合作倡议在欧洲空间局学习,该倡议旨在利用先进的空间应用学术研究。

好的文章,需要您的鼓励
16

- 最新资讯
- 最新问答
-
未来已至:Figure 02机器人引领AI硬件新时代
关键字: 人形机器人 2024-08-13 -
配天观点:具身智能商业化落地之路,道阻且长,但行则必至!
关键字: 配天 具身智能 2024-08-09 -
具身智能:人工智能新纪元,赋能未来科技新引擎
关键字: 具身智能 泰科机器人 2024-07-25 -
科技与艺术交融,BrainCo智能仿生手亮相北京中国国家博物馆丨设计智造与高质量发展特展
关键字: 强脑科技 智能仿生手 2024-07-22 -
保障六维力传感器在医疗机器人使用中的数据安全和隐私保护
关键字: 六维力传感器 鑫精诚 2024-07-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2018-06-27 16:15:46
- 2022-06-01 10:06:01
- 2019-11-22 11:18:52
- 2016-08-20 00:00:00
- 2019-03-04 16:49:59
- 2019-10-12 10:50:05
- 2022-08-24 12:09:31
- 2018-07-18 16:14:08
- 2022-08-30 15:17:40
- 2022-08-24 14:16:37
- 2022-09-13 12:17:35
- 2023-09-01 10:16:04
- 2024-08-13
- 2024-08-09
- 2024-07-25
- 2024-07-22
- 2024-07-18
- 2024-07-18
- 2024-07-18
- 2024-01-29
- 2024-01-16
- 2024-01-10









