





纸箱码垛机器人运动学分析与操作空间计算
时间:2018-01-04
阅读:10199

纸箱码垛机器人运动学分析与操作空间计算
运动学分析与操作空间计算
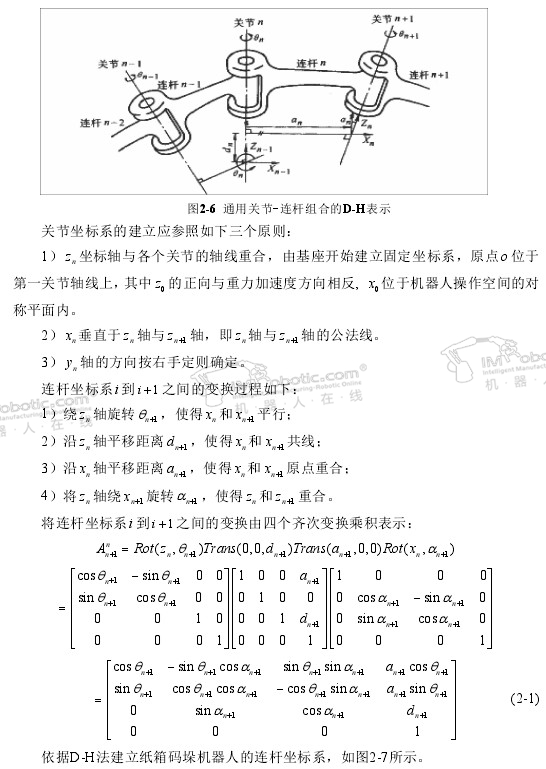
目前,我们常用D-H法来做机器人运动学分析,就是明确一个通用的步骤来为每个关节指定参考坐标系,同时确定相邻两坐标系之间的变换矩阵。目的是为了求得机器人的总变换矩阵。如图2-6所示,为通用关节一连杆组合的D-H表示。


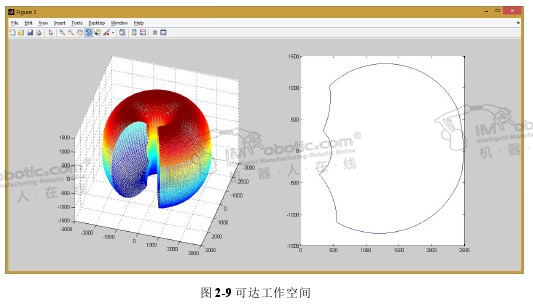
其中操作空间是根据一般码垛工作范围进行的预设,我们设计的码垛机器人必须满足这个操作范围才能实现正常的纸箱码垛功能。由于手座部分和腰部转座部分均为旋转机构,通常来讲,他们的运动不会对码垛机器人的平面操作空间产生影响。为此,在忽略腰部转座和手座的前提下,初设大臂长度为1200mm,前臂长度为1300mm,大臂操作范围为135°~8°,前臂操作范围为-5°~°160°(小臂操作范围为188°~60°)。建立笛卡尔坐标系,原点为腰部转座上的电机驱动轴心,以通过底座底面中心且垂于底面的垂线为Z轴,腰部座电机座中垂线为Y轴,整个运动范围为前臂前端点所能够到达的位置。结合预设产品参数,见表2-3所示,利用MATLAB进行操作空间的计算,如图2-9所示,其最远距离能达到2.4m以上,满足工作现场码垛要求,码垛机器人参数预设合理,为后续的机械设计奠定基础。
任何产品设计之初,决策阶段,必须先做现场分析和可行性分析,判定该产品的设计可行性,然后再做整体规划,提出设计方案。为后续各项细化做出初步的规划。本章首先做整体构架分析规划,规划整个纸箱产品在前期的包装和后期的码垛过程。然后再做码垛机器人码垛的流程梳理和码垛机器人的动作简化,并将系统分层。初步拟定工作节拍与工作范围。再根据一般码垛机器人的范围数据,初步设定关节角度与主要关节(大臂和前臂)长度,采用D-H法建立码垛机器人连杆坐标系,推导其运动学正逆解模型,为后续的机械设计与控制系统的设计提供理论基础。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
11

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









