
发布时间:2022年08月16日
运动规划(Motion Planning),是一个关注度比较高的技术话题,之前提的比较多的定义指的是从A点到B点规划一条无碰撞且柔顺的轨迹,用于引导机械臂进行特定的动作。几年的时间过去了,运动规划技术在结合产业需求落地中有哪些差异点或者说在不同场景下对运动规划的诉求分别是什么,这里谈一下个人见解。
(1) 无序抓取:强调A点可抓的能力,从“不可抓”到“可抓”的抓取规划技术
以无序抓取为例,特别是深料框下,各种姿态的工件往往做到能识别比较容易,但是识别的位姿A是否可抓是关键,放置点B一般在料框外。

图1 深料框无序零部件抓取
识别的抓取点A,在料框边角或者被工件叠压状态下,直接识别的位姿由于手抓和料框、手抓和工件的干涉而导致无法抓取的较多,因此,清框率是衡量无序抓取技术的重要指标。如何基于A产生更多的候选位姿An(1~N),并通过避碰库筛选得出“可抓”的A’是深料框无序抓取的重点。同时,将A’对应的手抓接近轨迹、退出轨迹一并计算得出。
关于无序抓取中的运动规划技术路线,之前的帖子已介绍过差异(图 2)。
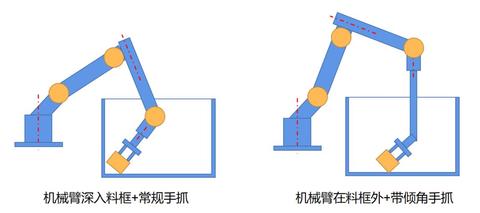
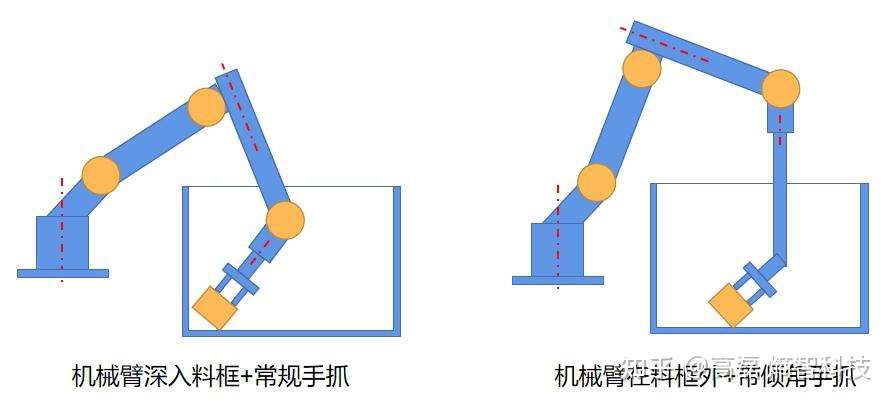
图2 抓取点从“不可抓”到“可抓”的抓取规划技术
(2) 切坡口:强调拍照自动生成轨迹且过程轨迹匀速,免示教
切坡口应用中,每个点基本都可达,也不需要避碰技术加持,解决的主要是多品类的钢板切割,如何快速生成切割轨迹的问题。
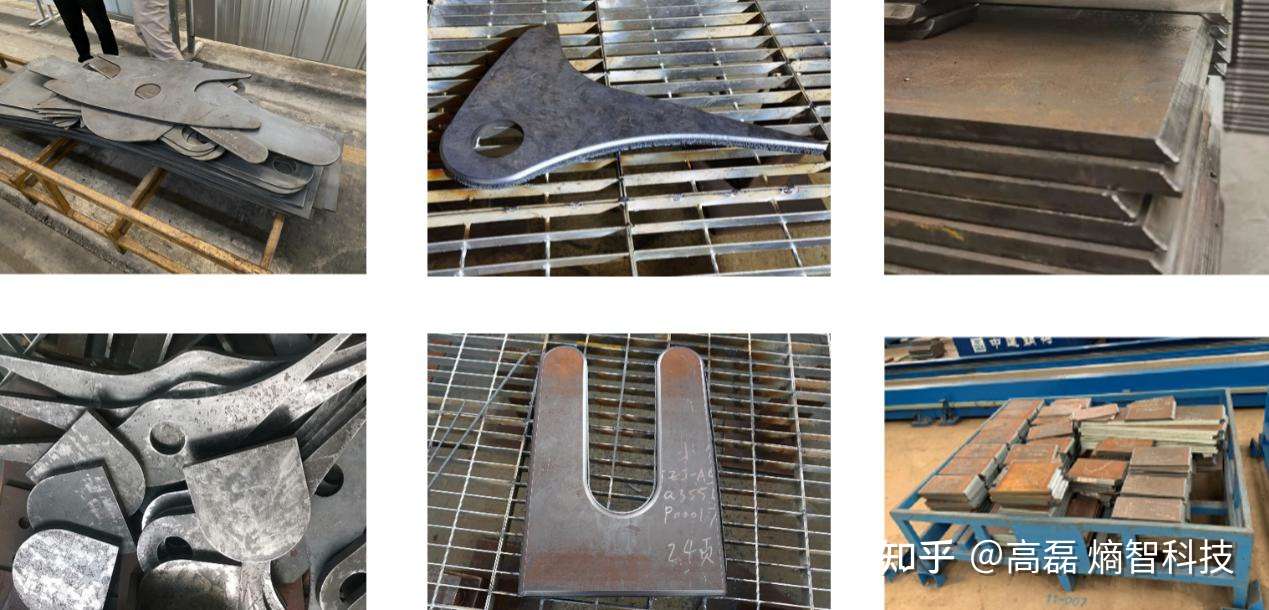
图3 切坡口场景
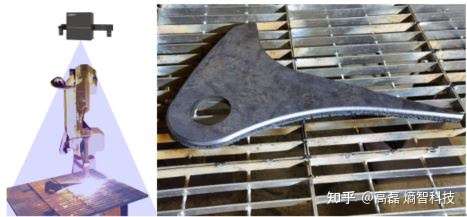
图4 免示教,基于拍照自动生成轨迹技术
(3) 汽车主机厂全自动化焊接:强调大量焊接点位的示教效率
汽车主机厂是高度自动化的,大量夹具可以保证工件位置的一致性,目前普遍的方式就是机器人示教技术,但是示教工作量庞大。这里A点和B点基本是可达的,但是A到B点之间需要穿过复杂的环境,需要不少经验,这里的诉求主要是“A到B之间无需示教的运动规划”技术,过程轨迹不唯一。
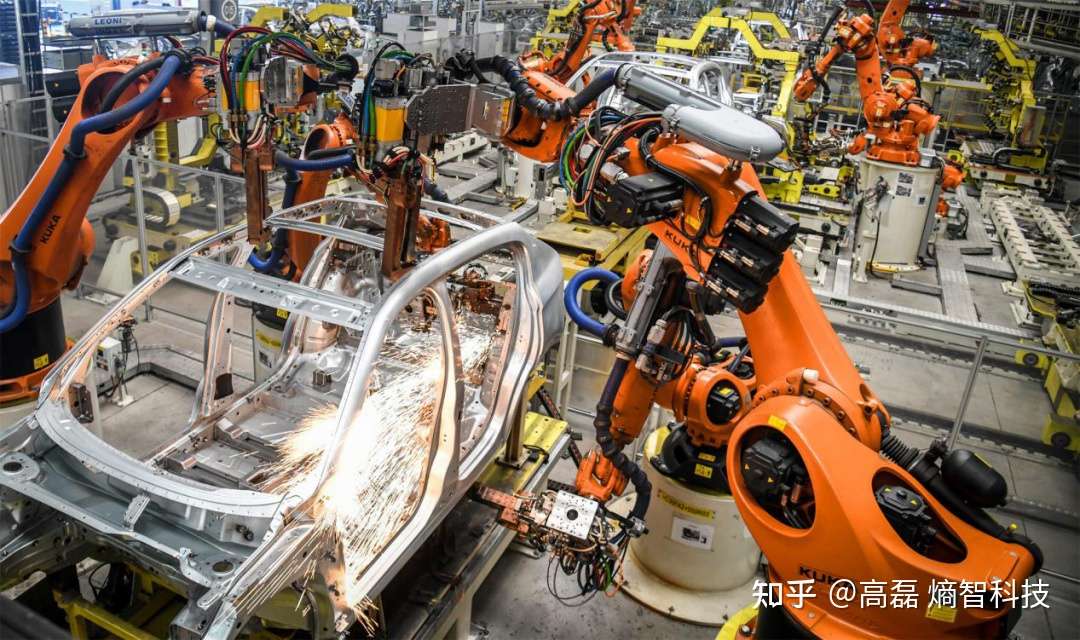
图5 汽车焊接生产线
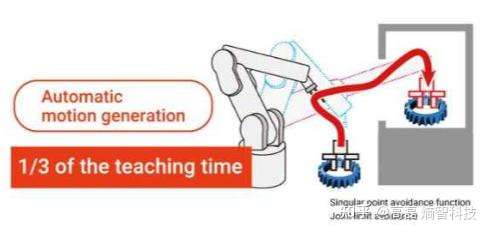
图6 无需示教的运动规划技术
(4) 更易用的图形化轨迹编程技术
无论是哪种应用,都少不了机器人端的编程,各家机器人编程语言都不一样。做的好一些的是基于场景需求按照一定规则编写一段固定的代码,后续只需要通过PC通讯的方式更新坐标即可,这样后续基本可以少编程或不编程。

图7 主流品牌机器人示教器
对于需求变化较多的场景,机器人端的程序无法固化,如果能够对各家机器人编程进行封装并统一编程接口,也可以大大降低编程难度(见图 8)。但是机器人经过多年的发展,已经产生了大量独有的工艺包、功能等,这种编程平台能否发挥这种功能有待验证,其通用性需要结合场景具体分析。不管如何,图形化编程的确是用户友好型的,是将来的趋势。
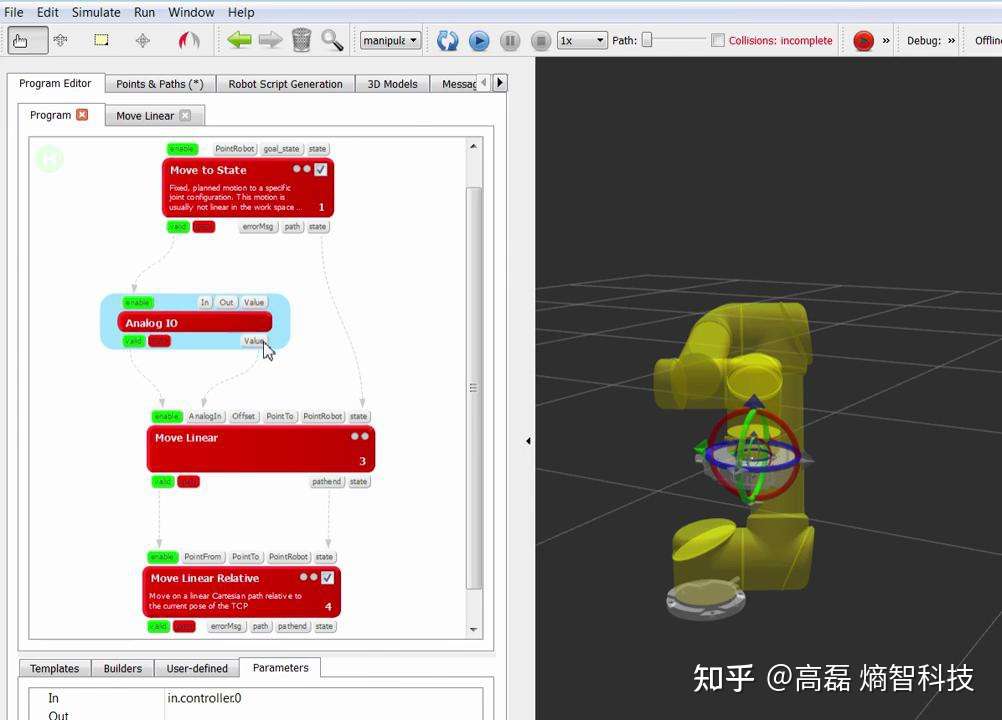
图8 图形化编程封装机器人本体指令的新编程环境
沪ICP备20024386号-2 沪公网安备 31011402005348
copyright © 机器人在线版权所有. all right reserved.
服务号:imrobotic
订阅号:im_robotic
免费发布项目需求

专业顾问电话联系

分析明确需求并发布

集成商在线报名

需求方选择合适供应商

专人跟进项目进度

需求方确认方案供应商

了解更多

















