
发布时间:2019年10月10日
KOSMEK机器人搬运解决方案
01
常用气动手爪
机器人自动化是目前发展的一个主流,在刚刚结束的工博会上,四大家族等各大机器人厂家都争相展示了自己先进的技术。
用到机器人的话,就必然要考虑到它前端使用的夹爪,常见的就是一些两爪三爪的机械手爪。
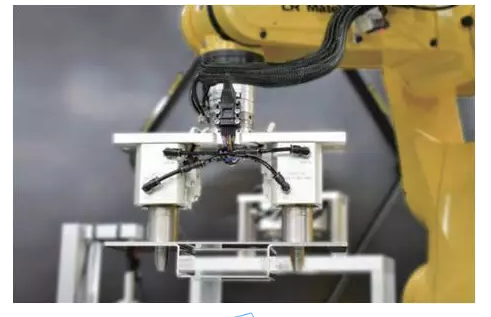
KOSMEK气动机械手爪

02
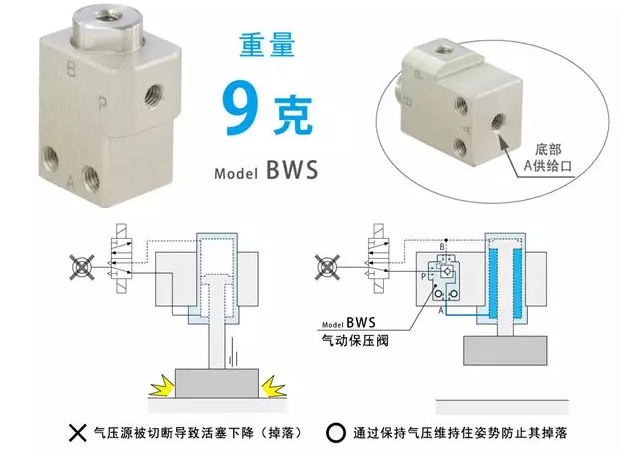
气动保压阀
气爪使用方便,但是有个常见的问题,那就是万一气源断气了,夹持的工件就会掉落。
为此,我们推出了一款气动保压阀(Model:BWS),它可以在气源断气的情况下,保持气爪的夹紧状态,防止工件掉落。并且它很小很轻,不占位置,不增加机器人负载。

03
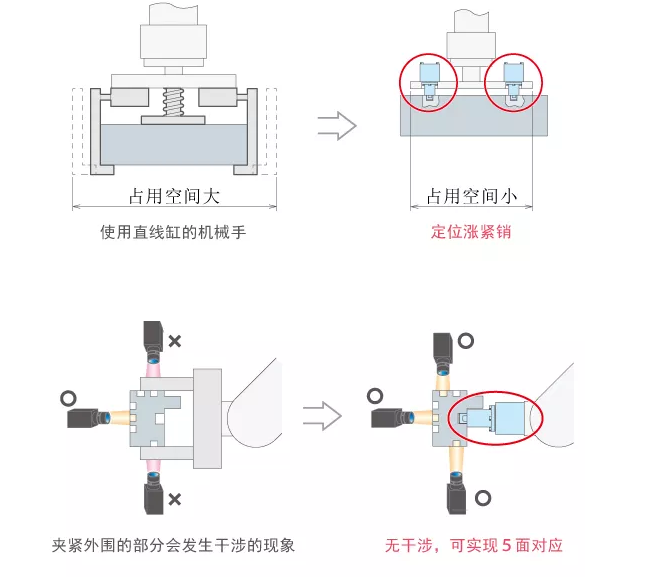
利用工件孔夹紧搬运
除了常见的这种两爪三爪的抓取方式,还有没有什么其他的抓取方法呢?
KOSMEK给出了自己的解决方案——利用工件孔进行夹紧搬运。相比于传统抓取方式,具有干涉小,夹爪可以做的更小更轻的优势。
常用型号有:
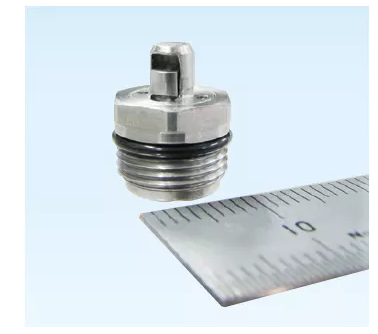
SWE(高能力气动涨紧下拉式夹紧器,夹紧力大)、
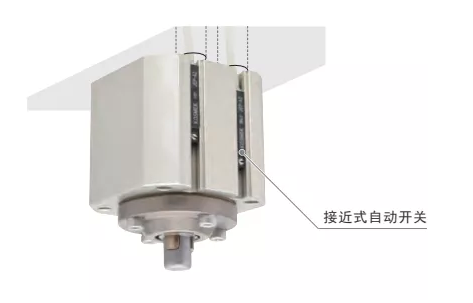
WKH(定位涨紧销,-D、-C组合使用时,重复定位精度±0.02mm,可安装磁性传感器)、
VRA(小型电子行业搬运用,可对应φ3-φ6的工件孔,-D、-C组合使用时,重复定位精度0.003mm)、
SWP(外涨定位夹紧器,点焊专用的夹紧搬运)
SWE(高能力气动涨紧下拉式夹紧器,夹紧力大)

WKH(定位涨紧销,-D、-C组合使用时,重复定位精度±0.02mm,可安装磁性传感器)
VRA(小型电子行业搬运用,可对应φ3-φ6的工件孔,-D、-C组合使用时,重复定位精度0.003mm)
SWP(外涨定位夹紧器,点焊专用的夹紧搬运)
04
机械手快换,手爪压板快换
用到手爪,现在很多人都会想到手爪快换。目前市面上也都有很多各种手爪快换,但是精度都不高,由于快换两侧连接有间隙,刚性也不好。
KOSMEK通过自主研发的内部机构,可以做到3μm的重复定位精度,并且能做到快换主气缸侧和工具侧XYZ 3个轴方向的零间隙连接,实现高刚性。
SWR(机械手快换装置)

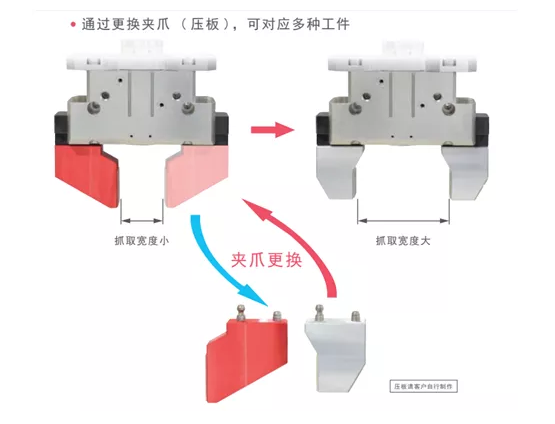
我只是搬运两个大小不一的工件而已,但是夹爪的行程又不能同时对应两个,用快换又有点浪费,这时候怎么办呢。
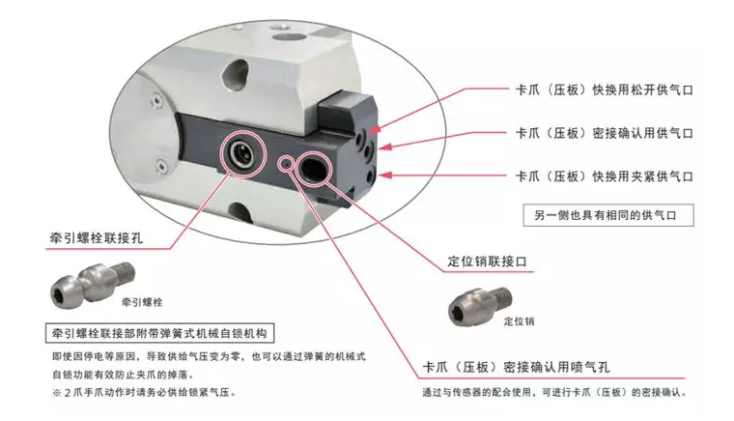
没事,KOSMEK也有解决方案,不用换整个夹爪,只需换夹爪前端的压板就行了。有几种类型的工件,做几套对应的压板就可以了。
WPW(附带夹爪快换装置的两爪式机械手爪)
05
一起探索解决方案
以上是我们自己简单整理的一些机器人搬运解决方案,更多内容,请关注我们微信公众号,进入我们官网下载详细产品选型信息,或直接通过下方联系方式联系我们,期待与您一起探索更多的解决方案。
沪ICP备20024386号-2 沪公网安备 31011402005348
copyright © 机器人在线版权所有. all right reserved.





服务号:imrobotic

订阅号:im_robotic
免费发布项目需求

专业顾问电话联系

分析明确需求并发布

集成商在线报名

需求方选择合适供应商

专人跟进项目进度

需求方确认方案供应商

了解更多










