
发布时间:2020年11月18日
注意事项——激光AGV导航仪水平
只有AGV导航仪水平,才能保证自身的位移和到反光柱的距离差是相同的。如果AGV导航仪倾斜,会导致距离变化和实际位移不符,导致叉车AGV定位误差变大。
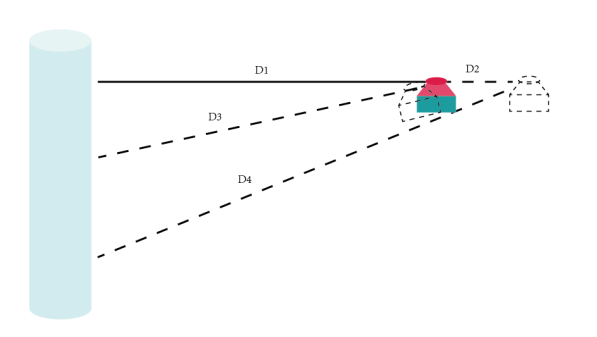
如图:D1、D2为水平状态下,AGV导航仪移动前后,分别与反光柱距离;D3、D4为倾斜状态下的距离。可以清楚的看出,(D2-D1)≠(D4-D3),即代表AGV小车定位会有误差。
注意事项——反光柱竖直和固定
反光柱倾斜,与激光AGV导航仪倾斜,两者对定位影响的原因是类似的,在此不做敖述。
反光柱固定,可以保障导航仪从任何角度、在任何时刻扫描到的数据,都是可靠的。如果反光柱晃动,势必会影响定位精度。
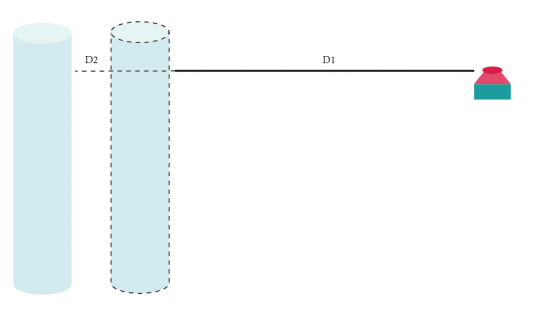
如图所示,D1≠D2
注意事项——反光柱布局合理
反光柱匹配过程,就是用当前识别到的反光柱布局,在已有AGV地图分布中,寻找到点数最多、形状最相似的对应关系。通过当前反光柱和已有反光柱的一一对应关系,计算激光AGV导航仪当前位置。
所以要求:
1、反光柱布局要散乱无章,不可以有相似度较高的分布
2、反光柱分布间距不宜太多,也不能太少,建议同时扫描到5-8个
3、精度要求不高的地方,可以适当减少反光柱数量;取放点等精度要求较高区域,需要适当增加反光柱数量。

沪ICP备20024386号-2 沪公网安备 31011402005348
copyright © 机器人在线版权所有. all right reserved.
服务号:imrobotic
订阅号:im_robotic
免费发布项目需求

专业顾问电话联系

分析明确需求并发布

集成商在线报名

需求方选择合适供应商

专人跟进项目进度

需求方确认方案供应商

了解更多

















