





基于Robot Studio的ABB工业机器人码垛工作站教学设计

随着“中国制造2025”的提出, 中国制造业面临着新一轮的转型升级, 工业机器人在转型升级中发挥着重要作用[1,2,3], 企业对于工业机器人相关的应用型人才的需求也越来越大。为适应市场和企业需求, 近几年高职院校陆续开设工业机器人技术专业, 为社会培养工业机器人应用技术人才。但是由于国际主流工业机器人品牌型号多, 设备也相对较昂贵, 学校很难保证足够的设备满足教学需求。
离线编程可以不占用生产时间, 能提高机器人的利用率和生产系统的工作效率[4,5,6,7,8,9,10], 也能有效解决教学过程中学校硬件设备的局限性。
ABB工业机器人是市场上主流工业机器人品牌, Robot Studio是ABB公司开发的专门针对ABB工业机器人的离线编程软件。
本文主要是通过在Robot Studio环境中搭建一个简单的虚拟码垛工作站, 使学生能够掌握离线编程中Smart组件应用、I/O信号的创建和连接、程序调试和仿真验证。
2 工作站的建立
本次工作站任务为:物块通过输送链从起点到达末端, 传感器检测到物块后发出信号, 机器人接收到信号后通过真空吸盘抓取物块, 并将物块放置在指定的工作台。
任务中选用的码垛机器人为IRB2600型ABB工业机器人, 其额定载荷为12 kg, 工作范围可达1.65 m, 能够满足码垛工作特性, 可在ABB模型库中直接添加。
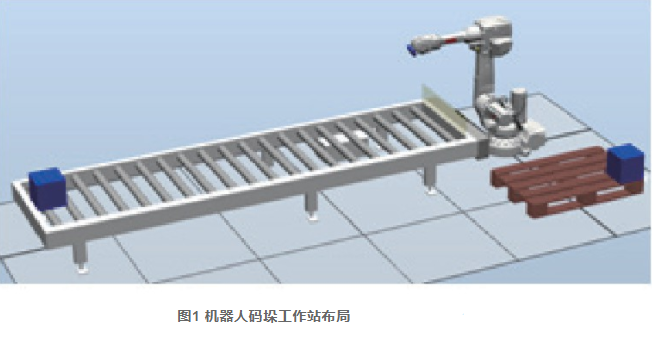
机器人末端执行机构为真空吸盘, 用来吸取物块。此处利用Robot Studio软件中的建模功能建模一个小圆柱体模拟真空吸盘。导入“输送链”并将其放置在合适的位置。输送链末端设置面传感器来检测物块到位信号。物块和放置的工作台也可以利用Robot Studio软件中的建模功能进行简单建模。码垛工作站布局如图1所示。
图1 机器人码垛工作站布局
3 输送链Smart组件的添加及信号连接
3.1 创建Smart组件
工作站仿真效果:物块出现在输送链的起点处, 在仿真开始时, 物块沿输送链从起点向末端自动运行, 到达末端后停止, 机器人完成抓取和放置的动作, 输送链末端的物块。
一旦被机器人抓取, 输送链起点处的物块自动产生复制品并沿输送链运行。
离线编程环境中物块在输送链上运行的模拟效果是通过Smart组件来完成的, 在“建模”选项卡中创建一个Smart组件并命名为SC_conveyor, 添加不同的组件可以完成不同的功能。
此处需要添加Source组件、Queue组件、Linear Mover组件、Plane Sensor组件、Logic Gate组件、Simulation Events组件、Logic SR Latch组件等。
3.2 属性与连接
添加属性与连接, 使Source组件和Queue组件产生连接, Source组件产生的拷贝对象自动成为Queue组件中即将加入队列的对象。
3.3 I/O信号的设置与连接
Smart组件需要设置一个数字输入信号di_start和一个数字输出信号do_inpos, 数字输入信号是用来启动SC_conveyor组件, 数字输出信号是发送给机器人的到位信号。Smart组件之间I/O信号的连接如表1所示。
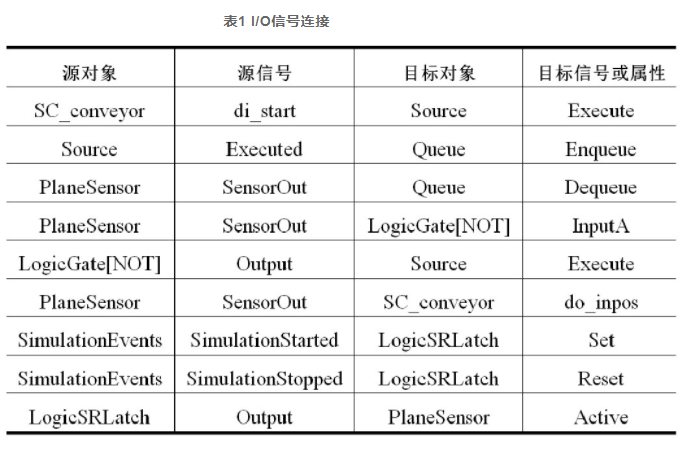
表1 I/O信号连接
4 工具Smart组件的添加及信号连接
工作站中的工具为真空吸盘, 通过吸盘抓取和放置物块, 工具的动画效果也通过Smart组件完成, 其操作步骤与输送链Smart组件类似。
5 机器人I/O信号设置
本工作站中机器人选用ABB标准DSQC652型I/O板, 此种型号的I/O通信板卡提供16个数字输入信号和16个数字输入信号的处理, 总线地址为10。工作站需要设置的数字输入输出信号分别为输送链末端检测物块到位信号di_inpos、真空吸盘反馈信号di_xpOK、输送链启动信号do_start和控制真空吸盘的I/O信号do_gripper。
6 创建工作站逻辑
将工作站的I/O信号与各Smart组件的信号之间建立连接, 工作站I/O信号连接见表2。
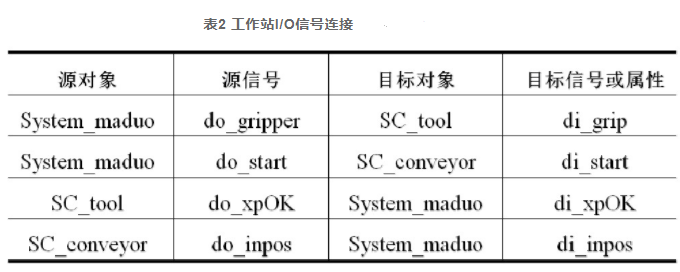
表2 工作站I/O信号连接
7 创建程序与仿真
搭建好工作站, 可以利用Robot Studio离线仿真软件的基本功能实现程序编辑和整个工作站的仿真验证。
8 结语
本文通过在Robot Studio虚拟仿真软件上搭建简易码垛工作站, 让学生学习并掌握ABB机器人离线编程的基本知识和技能, 有利于提高学生创新思维, 有效利用离线仿真软件的平台, 实现并验证实际生产线的可行性, 提高效率和成本。

好的文章,需要您的鼓励
27

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









