





两种显示方式丨关于机器人当前的位置信息

机器人的当前位置信息表示的是机器人在空间上的位置和姿态。如何察看机器人当前的位置信息?以下介绍当前位置信息的两种显示方式:基于关节坐标值的显示和基于直角坐标值的显示。
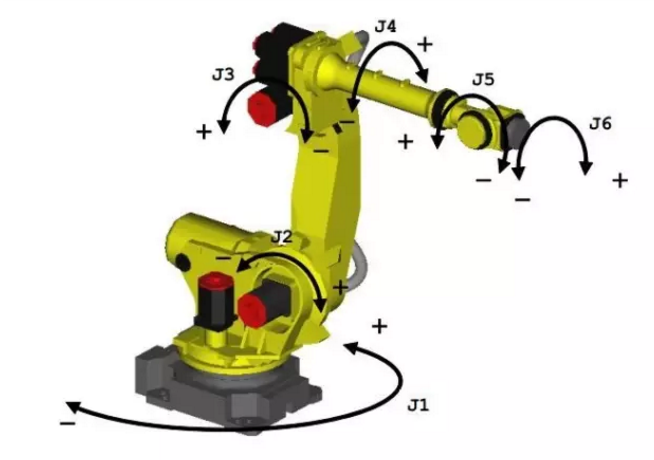
关节坐标值
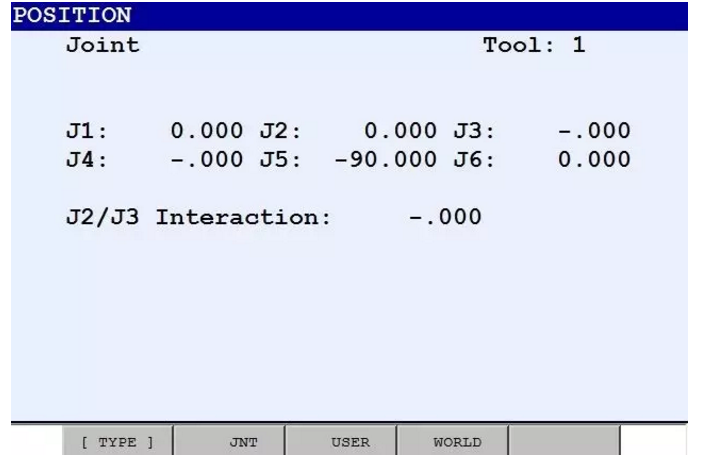
基于关节坐标值的显示:通过各轴相对于基座侧的轴的旋转角来显示当前位置。
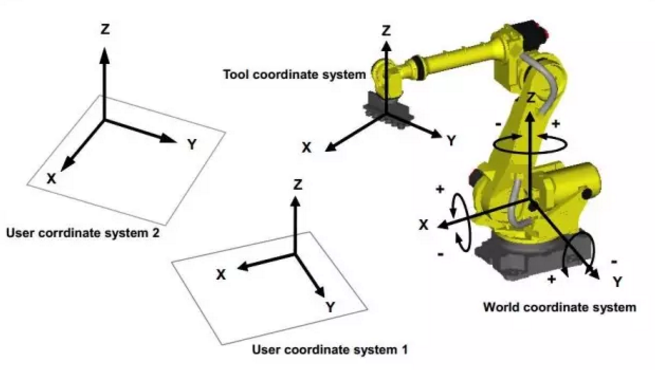
直角坐标值
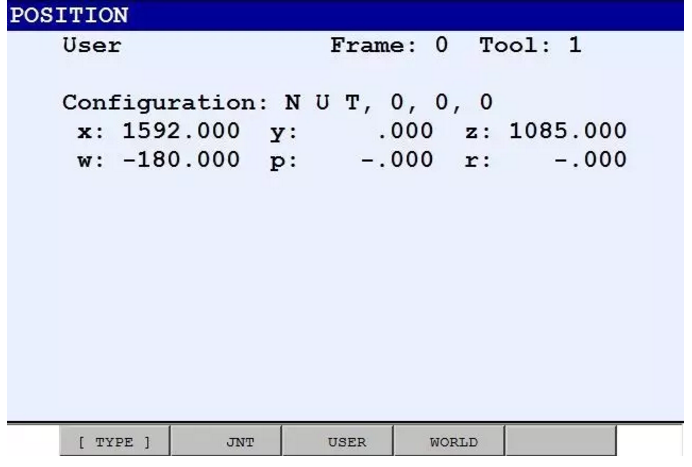
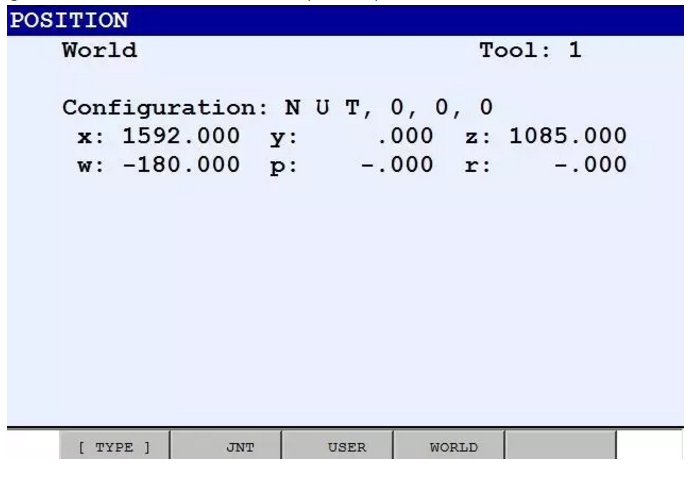
基于直角坐标值的显示:为了确定工具的位置和姿势,使用机器人手腕中所定义的工具坐标系和设定于空间的直角坐标系来显示当前位置信息。
此处以R-2000iB/165F为例,如何才能显示机器人的当前位置呢?
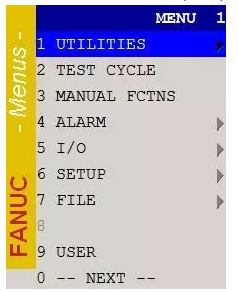
步骤1:按下【MENU】(菜单)键,显示画面菜单。
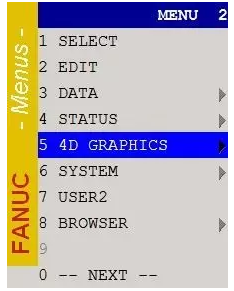
步骤2:选择“0 —— NEXT —— ”,选择后续菜单的“ 5 4D GRAPHICS ”。
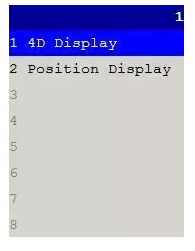
步骤3:按下F1【类型】,选择“ 2 Position Display ”。显示当前位置界面。
注:按下POSN(位置显示)键也可以显示当前位置界面。
① 要显示关节坐标值,按下F2 “JNT(关节坐标)”。
② 要显示用户坐标值,按下F3 “USER(用户坐标)”。
③ 要显示世界坐标值,按下F4 “WORLD(世界坐标)”。
操作面板的创建功能
所谓操作面板的创建功能,是指在示教器上自定义一个界面。在这个界面上,可以自定义字符,也可以创建图标,主要用途有:
1)寄存器或系统变量发生变化时,变更显示的指示灯
2)按钮被按下时,将指定值写入寄存器或系统变量
3)根据按钮状态,切换寄存器或系统变量的值
4)Karel程序的启动
那么使用操作面板创建功能,有什么好处呢?
一个简单的例子:用户需要知道在生产中某个DO信号是在打开还是关闭状态,一般需要去Digital I/O页面去查看。有了操作面板创建功能,可以通过图标的方式一目了然的看出该信号的状态。
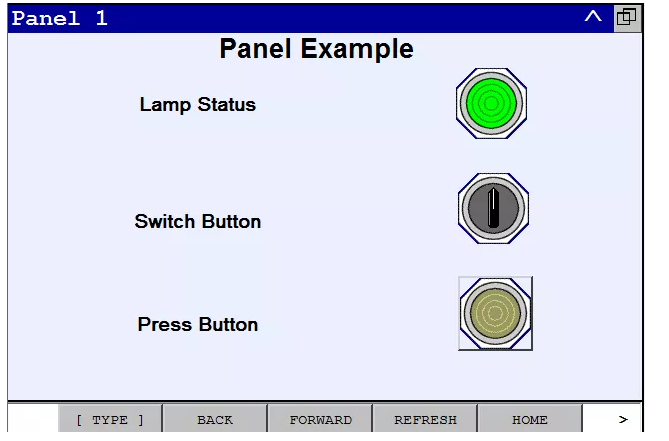
上图是创建好的一个操作面板。在这个自定义面板中,左侧的Lamp Status,Switch Button和Press Button是写入的字符串模块,内容、字体大小、是否加粗、位置均可以自定义。右侧的按钮图标可以从图标库里调用,在这个面板中第一个图标为指示灯图标,第二个是开关图标,第三个是按钮图标。其作用如下:

其中,第一行的Lamp Status中,与寄存器R[1]相关联。当R[1]≤0时,显示灯为
,当R[1]>0时,显示灯为 ;
;
第二行的Switch Button,与DO[1]相关联。当DO[1]=ON时,开关状态为 ,当DO[1]=OFF时,开关状态为
,当DO[1]=OFF时,开关状态为 。反之,也可以点击面板上的开关图标,同时DO状态会相应的发生变化。
。反之,也可以点击面板上的开关图标,同时DO状态会相应的发生变化。
第三行的Press Button,与SR[1]相关联。当点击按钮图标时,SR[1]中的字符串将变成指定的字符串内容。
通过MENU-BROWER可以直接进入设定好的面板,如下图所示:

使用操作面板的创建功能,是需要安装机器人选项软件(Panel Wizard)的。在示教器上最多可创建4个操作面板,且只要进行示教器上的操作即可创建,无需PC。注意:请使用带有触摸屏的示教器。
按MANU-NEXT-BROWSER-Panel Wizard进入设定画面,并选择Start Wizard:
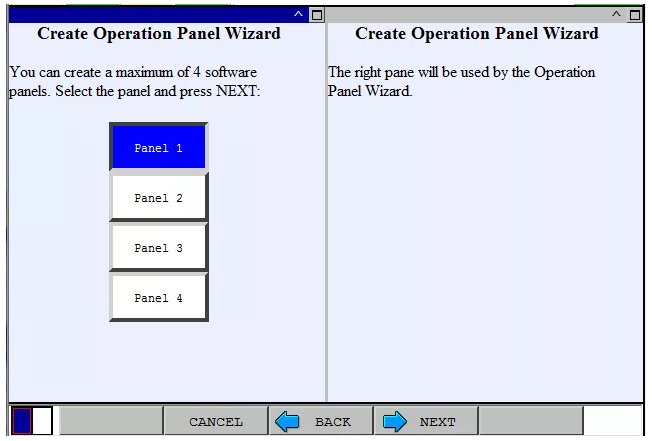
这里可对4个操作面板进行创建、修改及删除。选择Panel 1后,可进行模块的选择:
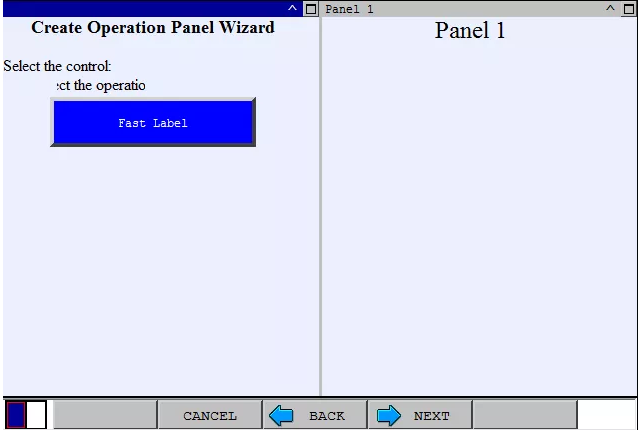
点击Fast Label,可弹出如下9种类型的模块:
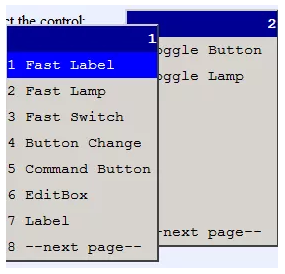
选择模块以后,便可以进行编辑了,并创建自定义的操作面板。当然创建及编辑的过程需要花费一定的时间,也就需要用户根据操作手册来进行摸索了。
有了这样一个功能,用户可以按照自己的想法和思路,去创造属于自己的界面,在生产中实现“可视化”。
【相关推荐】

好的文章,需要您的鼓励
15

- 最新资讯
- 最新问答
-
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25 -
机器人打磨抛光设备有哪些?特点是什么?
关键字: 机器人打磨 抛光 特点 2024-06-20 -
什么是SLAM技术?应用领域有哪些?
关键字: slam技术 应用领域 2024-06-19
-
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05 -
3d相机机器视觉检测原理
标签: 3D相机,视觉检测 提问:木木 2024-06-17 13:03:03 -
安川机器人驱动器如何设置参数?
标签: 安川机器人,驱动器,设置参数 提问:先知 2024-06-13 10:15:03


- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06
- 2024-06-04









