





【技术干货】图解KUKA机器人机械系统

中国制造业发展的步伐越来越快,中国工厂使用的工业机器人数量越来越多,要想成为工业机器人技术型人才,工业机器人的内部构造必须要了解,下面为大家介绍一下库卡机器人的构造。
完整的KUKA机器人系统组成

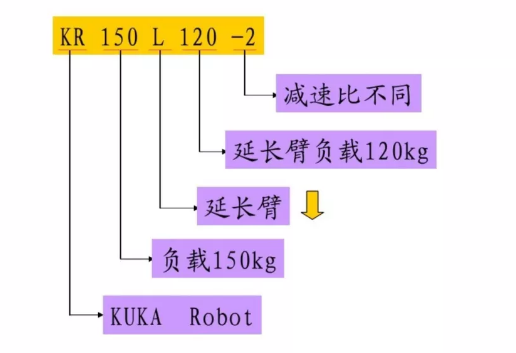
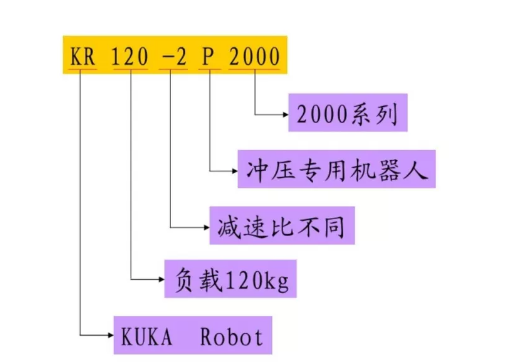
KUKA机器人型号
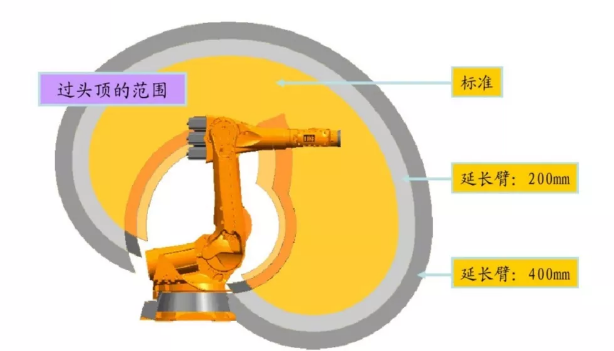
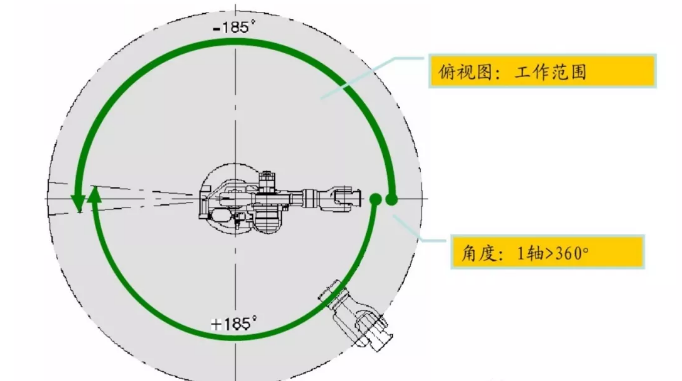
工作范围
说明:
1、KR***是标配,后面的L120-2则不是。如34线的机器人型号是KR120-2P2000.↓
2、负载是指TCP点承受能力,150kg指6轴中心点处承受能力;而120kg则增加延长臂后新的TCP点处承受能力( 力矩增大)。
KUKA机器人结构

工作范围
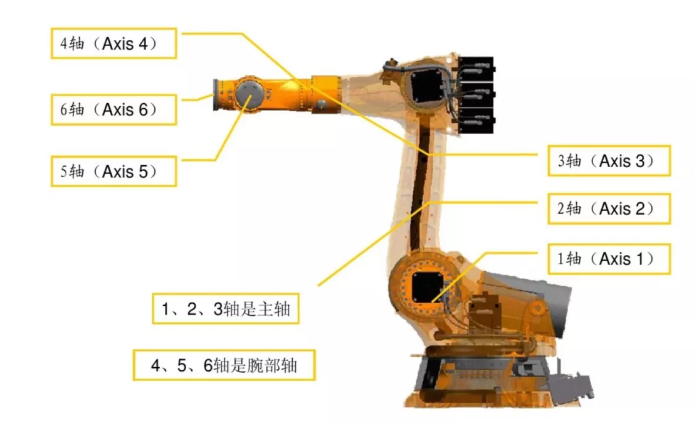
KR的拆分
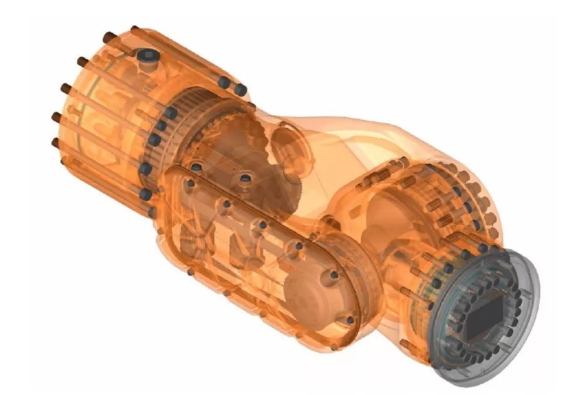
腕部的拆分







臂的拆分











4轴到6轴电机



连接臂的拆分



2轴电机




2轴传动装置



旋转机构的拆分


1轴电机







1轴电机传动装置





平衡系统的拆分












腕部维护


主要轴的维护



1轴润滑油的更换


一、机器人驱动装置
概念:要使机器人运行起来, 需给各个关节即每个运动自由度安置传动装置 作用:提供机器人各部位、各关节动作的原动力。
驱动系统:可以是液压传动、气动传动、电动传动, 或者把它们结合起来应用的综合系统; 可以是直接驱动或者是通过同步带、链条、轮系、谐波齿轮等机械传动机构进行间接驱动。
二、直线传动机构
传动装置是连接动力源和运动连杆的关键部分,根据关节形式,常用的传动机构形式有直线传动和旋转传动机构。
三、旋转传动机构
采用旋转传动机构的目的是将电机的驱动源输出的较高转速转换成较低转速,并获得较大的力矩。机器人中应用较多的旋转传动机构有齿轮链、同步皮带和谐波齿轮。
四、机器人传感系统
1、感受系统由内部传感器模块和外部传感器模块组成, 用以获取内部和外部环境状态中有意义的信息。
2、智能传感器的使用提高了机器人的机动性、适应性和智能化的水准。
3、智能传感器的使用提高了机器人的机动性、适应性和智能化的水准。
4、对于一些特殊的信息, 传感器比人类的感受系统更有效。
五、机器人位置检测
旋转光学编码器是最常用的位置反馈装置。光电探测器把光脉冲转化成二进制波形。轴的转角通过计算脉冲数得到,转动方向由两个方波信号的相对相位决定。
感应同步器输出两个模拟信号——轴转角的正弦信号和余弦信号。轴的转角由这两个信号的相对幅值计算得到。感应同步器一般比编码器可靠,但它的分辨率较低。
电位计是最直接的位置检测形式。它连接在电桥中,能够产生与轴转角成正比的电压信号。但是,由于分辨率低、线性不好以及对噪声敏感。
转速计能够输出与轴的转速成正比的模拟信号。如果没有这样的速度传感器,可以通过对检测到的位置相对于时间的差分得到速度反馈信号。
【相关推荐】

好的文章,需要您的鼓励
20

- 最新资讯
- 最新问答
-
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17
-
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00


- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18









