





微软推出新的机器人开发工具 以扩展对ROS / ROS2的支持

近日,微软在澳门ROSCon上宣布推出新的机器人开发工具,以扩展对ROS / ROS2的支持。
自2019年5月起,Microsoft Windows 10就已正式支持ROS。ROS就是机器人操作系统。ROS是一个灵活的框架,使开发人员能够编写用于高级机器人行为的软件。
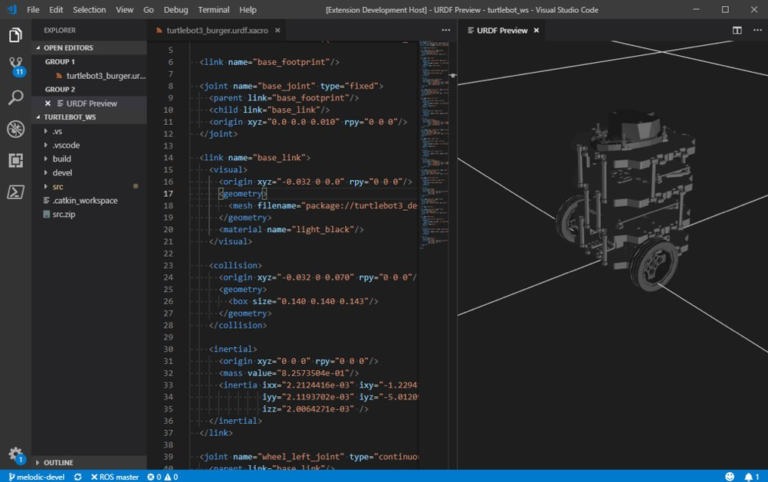
新工具包括用于ROS的Visual Studio Code扩展,用于测试和模拟的Azure VM ROS模板支持,Azure Kinect ROS驱动程序等。一些新功能包括:
1、用于ROS开发的自动环境配置
2、启动,停止和监视ROS运行时状态
3、自动发现构建任务
4、一键式ROS包创建
5、rosrun和roslaunch的快捷方式
6、Linux ROS开发
7、对于ROS2,此扩展支持工作区发现,运行时状态监控器和内置工具集成。
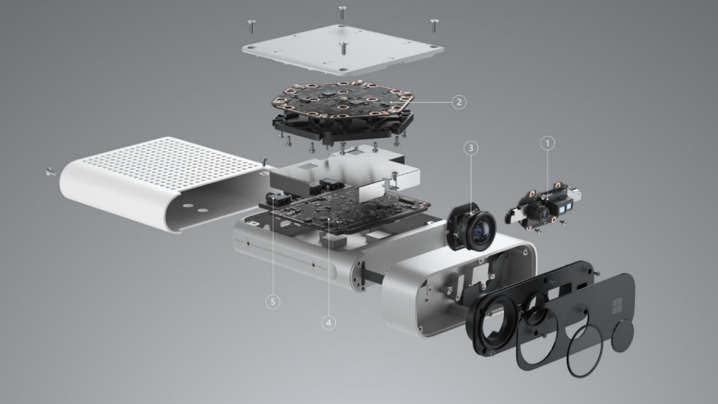
Microsoft展示了Azure Kinect开发人员套件,这是其最新的Kinect传感器。它包含与Hololens 2中使用的相同的深度传感器、4K摄像头、硬件同步加速计和陀螺仪(IMU)以及7元素麦克风阵列。与硬件版本一起,还有一个用于驱动Azure Kinect的ROS节点。它将很快支持ROS2。
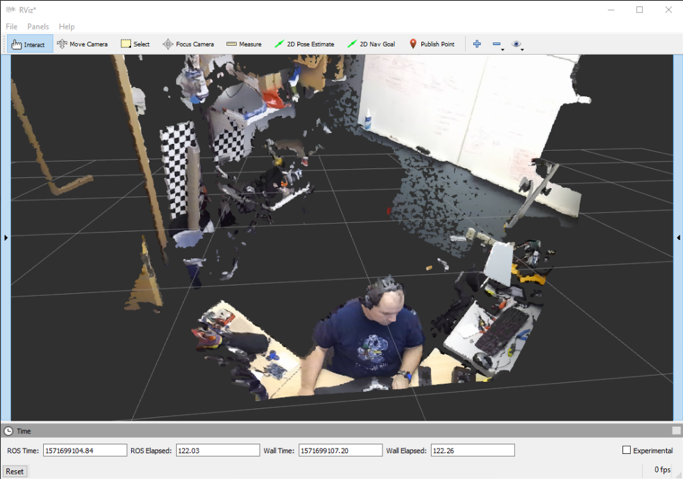
微软表示,Azure Kinect ROS节点发出一个PointCloud2流,其中包括深度和颜色信息,以及深度图像,来自IR和RGB相机的原始图像数据以及高速IMU数据。
ROS使人体追踪成为可能,通过链接到Azure Kinect身体跟踪SDK,并输出每个被跟踪个体的图像蒙版和身体跟踪关节的姿势作为标记。
现在,还有一个Windows机器学习API,它使机器人开发人员可以使用预先训练的机器学习模型。微软表示,Windows机器学习ROS节点将加速机器学习模型的推论,发布相对于图像发布者框架的可视化标记。Windows ML的输出可用于避障,对接或操纵。
微软以强大的行动力展示了对机器人技术的更大承诺。

好的文章,需要您的鼓励
1

- 最新资讯
- 最新问答
-
兼顾极小码与大景深,超耐用手持读码器IDH9000全新上市
关键字: 海康 读码器 新品 2024-09-19 -
FTP 系列仿人五指灵巧手震撼来袭!
关键字: 因时机器人 灵巧手 新品 2024-09-13 -
超级SUNLINE已就位!一款不容错过的阪东轻型好带
关键字: 阪东 同步带 2024-09-12 -
迅捷力控,突破并联,自适应并联机器人 Moonlight 玄晖批量开售
关键字: 非夕 并联机器人 2024-09-05 -
迅捷力控,突破并联,自适应并联机器人 Moonlight 玄晖批量开售
关键字: 非夕 并联机器人 2024-09-05
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2021-01-05 15:49:07
- 2022-06-09 17:46:18
- 2021-03-09 11:18:10
- 2021-02-05 13:07:47
- 2019-12-19 17:58:28
- 2021-03-05 18:02:45
- 2024-09-19
- 2024-09-13
- 2024-09-12
- 2024-09-05
- 2024-09-05
- 2024-09-04
- 2024-08-27
- 2024-07-09
- 2024-08-27
- 2024-08-27









