





【ATI】案例 | 六轴力传感器在微创手术机器人研究中的应用

微创手术在世界范围内已经被广大患者和医疗行业广泛认可,成为了在很多领域代替传统外科手术的良好选择。相对于传统外科手术微创手术带来的局部创伤更小,损伤轻,术后并发症如感染发炎等风险更小,也带来更短的恢复周期,术后美容效果更好。但相应的代价是医生操作空间受到严重限制,手术视野需借助其他设备提供。这也就形成了微创手术好处多、操作难的两难局面。因此大批科研工作者,设备厂商为解决微创手术操作难的问题开发了丰富的辅助微创手术的先进手术机器人系统及相关设备。ATI是其中具有代表性的设备供应商。
ATI 工业自动化是世界领先的机器人附属产品和机械手臂工具的工程研发公司,关于六轴力/力矩传感器,早在上世纪80年代中期ATI就创造性地发明了可以测量六维力和力矩的传感器。经过不断的研发和创新,ATI六维力/力矩传感器已经发展出Nano、Mini、Omega、Delta、Gamma及Axia80等型号丰富、经久耐用的传感器系列产品线。
今天我们就来介绍一下,关于六轴力/力矩传感器的一个很重要应用领域--微创手术机器人。

微创手术机器人的高要求
出于医疗行业的敏感性和高要求,微创手术机器人在满足基本的末端执行器功能基础上要尽可能多地为医生提供辅助。因此也对手术机器人的功能提出了更高的要求。
因为微创手术只在病人病灶处打一个或若干小切口,所有手术器械和手术内窥镜都要从小切口内插入,所以手术器械的运动范围受到了极大的限制。为保证手术效果,先进的手术器械或手术机器人都选择在手术器械的末端加入更多的自由度以补足小创口引入的运动限制。典型的例子就包括Da Vinci和Zeus等手术机器人系统配备的灵活性末端执行器。这使得手动操作变得更加困难,为了补足灵活性手术器械的操作难问题,手术机器人都具有主从控制的结构,即操作者通过不与末端执行器连在一起的主控制器对手术器械进行遥操作。这样就解决了灵活型手术器械的操作问题。
力反馈的重要性
医疗类应用与传统工业应用的不同在于被操作对象是病人或病人的敏感脏器,因此在精密手术应用当中机器人运动学控制就无法满足保护病人的要求。再加上遥操作将医生的手与手术器械隔开,从而切断了力的反馈,这无疑加重了机器人微创手术对病人造成附加伤害的可能,也为机器人侵入式诊断增加了困难。因此,力反馈在手术机器人系统中就成为了一些领域的必备条件,也是科研领域的一个重要方向。ATI以其卓越的产品可靠性和高品质首先进入了研究者的视野。
2012年,来自约翰霍普金斯大学的学者和医生就为解决手术机器人缺乏力传导的问题发明了一款可以精确感知和反馈力的手术机器人主端控制器。它能够精确地感知医生在主端控制器使用的力和力矩,从而使主端控制器按照医生所使用的力和力矩进行反应,以达到减少手部抖动,稳定控制机构的目的,给医生以最直观的反馈,就好像医生是在拿着手术器械进行操作一样。这样做的好处在于医生的操作更为直观,减少长时间手术的疲劳,提升手术安全性。也使将来把医生施加的力精确传到手术执行器端成为可能。
ATI Nano17加入完美实现力反馈
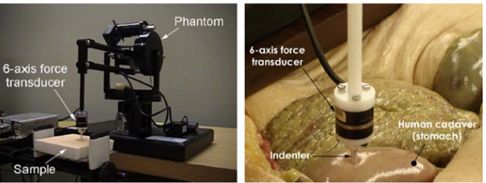
该手术机器人包括一个三自由度位移平台,一个一自由度旋转RCM(Remote Center of Motion)和一个两自由度位移加旋转连臂。由此构成六自由度机器人,该机器人将ATI Nano17 SI-12-0.12装在医生抓取的手术机器人手柄末端,以便发挥传感器最大精度性能。该设计要求施力范围在0.03N到3N之间,并且要求精度在0.03N以上,控制系统频率需在1000Hz以上以满足力反馈的实时性。ATI传感器满足以上所有条件,甚至更好。ATI Nano17 传感器在满足精度要求的前提下提供7800Hz的采样频率,并在Z轴方向提供800N的过载保护。
ATI的六轴力/力矩传感器采用硅应变原理,最大程度减小信号噪声,并具有卓越的稳定性。因为医疗应用对于器械卫生有特殊要求,ATI可提供IP68防护版本,使传感器本体可以经受常规的医疗消毒,是医疗领域力传感器的理想首选。同时ATI的六轴力/力矩传感器提供了各种编程语言的库函数和源代码,以辅助科研工作者进行创新。
目前,该手术机器人原型机已完成并且经过了实验验证。在手术机器人穿针实验中十组实验全部成功,作为对照试验的其他无传感器辅助的穿针实验则失败大半(51%)。这首先证明了该手术机器人的力反馈辅助在手术机器人当中的极其重要性,其次也印证了ATI六维力和力矩传感器优异的性能,精度,采样速度,稳定性缺一不可。
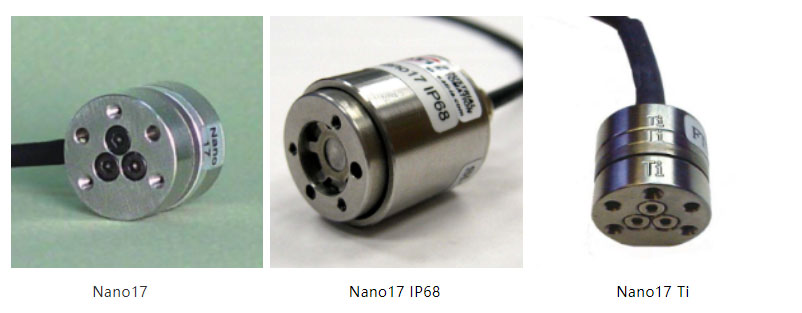
Nano17:直径17mm的六轴力/力矩传感器
前面我们提到了ATI的六轴力/力矩传感器在微创手术机器人研究中的重要作用,接下来我们就来了解一下文中的这款Nano17吧。
Nano17,是目前ATI所有传感器中最小的一款六轴力/力矩传感器,非常适用于研究应用领域,典型的应用包括,牙齿研究、外科机器人、机器人手研究、手指力研究等。
Nona17具有以下特点:
· 高分辨率:可以解决下降到0.318克力。
· 高强度:高屈服强度不锈钢电火花线切割加工。最大允许单轴过载值是3.1至13.8倍额定容量。
· 高信噪比:是传统金属应变计的75倍。放大后的信号接近零的噪声失真。
· 线缆:-E出线的模式的传感器,线缆可以承受10磅的拉力。
· IP65和IP68版本:IP65等级可以在潮湿的环境下工作,IP68等级可在水下作业,其最大水深可达到4米。
ATI的Nano17传感器,除常规版本外,还有钛合金版本Nano17 Ti,其更适用于受限空间研究中的应用,典型应用如生物力学研究、高磁环境中的测量等。
ATI的力/力矩传感器被广泛的应用与各个工业领域,如产品测试,机器人装配,打磨和抛光等。在研究领域我们的传感器被用于外科手术机器人,仿生机器人,康复机器人,以及神经学等其他不同的应用中。
除了Nano17这一型号,ATI 六轴力和力矩传感器还有很多其他型号,如Mini40,Mini45,Gamma等也有大量的医疗手术机器人应用,更多可参考:https://www.ati-ia.com/products/ft/ft_ModelListing.aspx

好的文章,需要您的鼓励
14

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
ATI 工业自动化有限公司
 6年
6年



- 2019-10-23 12:29:27
- 2019-12-20 14:36:09
- 2020-03-04 14:44:40
- 2021-06-21 10:31:34
- 2021-02-19 17:46:01
- 2020-09-09 10:17:08
- 2022-10-03 03:20:00
- 2023-02-18 11:21:35
- 2022-09-07 17:50:03
- 2022-10-08 13:18:17
- 2022-10-11 08:02:14
- 2022-10-30 10:08:07
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









