





【ATI】案例 | 外科医生意想不到的机器人“触觉”感知来竟自ATI传感器?

传统外科手术当中,外科医生结合经验、肌肉记忆力和他们的触觉的就可以本能地确定执行每个手术步骤恰当的手术器械和手法。随着他们做了越来越多的外科手术,能积累更多有实践意义的经验。所以,当外科医生走到手术台前并拿起器械时,他们已经凭借经验和知识确定了完成手术所需的正确切口位置和恰当的力度。

背景介绍
外科医生凭借他们的知识和直觉进行手术的能力使他们成为各自领域的高效专家。通过利用他们的经验和感官,外科医生实际上可以凭感觉进行操作,并且可以在操作过程中进行实时调整。
由于机器人等其他自动化设备功能非常有限,使得手术机器人执行在患者身上的手术非常具有挑战性。机器人本身没有记忆或感觉,几乎没有提供动态控制或主动协助的功能。但是,借助ATI的力/扭矩传感器等尖端技术,机器人可以感知周围环境并执行更多的复杂任务。
范德堡大学是先进机器人和机械应用(ARMA)实验室的所在地,该实验室由Nabil Simaan教授领导。ARMA实验室是这所大学机械工程学院的一部分,专注于医疗领域的先进机器人研究,希望通过机器人手术来减少病人的不适和缩短恢复时间。
他们的研究方向之一是通过在控制、反馈等各个方面连接手术机器人和医生使用的远程主控制器。他们希望通过减少机器人手术的不确定性来实现更高水平的医疗服务。
解决方案
当今的外科手术机器人在很大程度上依靠人工接入,即使机器人正在操作工具并接触患者,他们仍然需要“编程”来知道使用哪个工具,把它放在哪里,什么时候切割,使用多大的力,等等。除了本身需要动手术之外,外科医生还远程管理手术当中的所有变量,这使得机器人手术非常繁琐。
【01 ARMA解决方案弥补了】
远程控制与手术机器人之间缺失的关键一环
ARMA研究人员致力于使机器人成为手术发挥更大的作用,以帮助弥补外科医生与手术创面因为遥操作产生的隔绝。
通过逆向工程为外科医生增加触觉是一个相当大的挑战。外科医生靠感觉工作,这意味着执行手术所需的接触力的确切数量是未知的。Simaan博士及其团队开发了一种交互式模型,该模型可以通过ATI的六维力和力矩传感器的反馈来测量和控制接触力。
他们设计的模型解读了从模拟机器人手术中收集到的接触力信息。该应用程序包括DaVinciResearch Kit机械臂,ATI 的Gamma六维力和力矩传感器和由仿生硅材料制成的“病人”。当外科医生执行手术时,机器人施加在硅模型上的力和力矩会被实时捕捉,从而在一定程度上反映病人的感受。
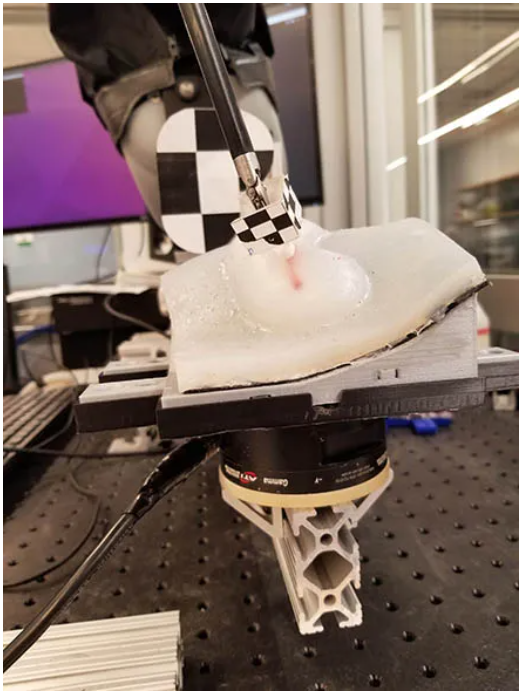
事实上,我们不能在人体内部放置一个力传感器来收集这些数据。然而,ARMA应用程序确实补上了远程主控制器和手术机器人之间缺失的一环。通过开发预测模型,外科医生可以感知这个过程对患者身体的影响。ATI的F/T传感器同时捕获全部6个自由度的数据,从而可以实现高度准确,精确的位置数据,从而渲染出真实的模型。在整个模拟过程中,力和力矩数据会实时更新,模型会根据力和力矩的变化进行调整。
通过模拟实验,研究团队深入了解了外科手术的作用力和扭矩如何影响患者,从而有助于量化以前只能粗略感觉的接触力。
【02 ATI六维力和力矩传感器给了外科医生】
实时“触觉”感知
准确了解机器人如何与有关力和扭矩的人体结构相互作用,可以使外科手术机器人具有更复杂的功能。例如,ATI的F/T传感器可以集成在手术机器人的机器人端,以监测和控制机器人手术的接触力。有了触觉反馈,传感器就像外科医生手上的一个虚拟装置。这将有助于简化外科医生的注意力,并防止对病人施加过多的压力。

ATI Gamma六维力和力矩传感器
ARMA通过利用机器人和力传感技术,使外科手术机器人在这一过程中发挥更加积极的作用。ATI 六维力和力矩传感器提供的接触力数据与机器人的能力相结合,可以执行要求苛刻的高精度,高重复精度的任务,帮助外科医生在机器人手术期间保持触觉反馈。
关于ARMA更多介绍
A.R.M.A.是高级机器人与机械应用研究实验室。ARMA专注于高级机器人技术研究,包括医学应用的机器人技术,机构设计,控制和远程操纵。专注于需要新颖的设计解决方案并需要对设计建模和控制做出贡献的技术。ARMA在先进的医疗技术机器人技术方面处于领先地位,包括用于外科手术的高灵敏蛇状机器人,用于耳蜗植入手术的可控电极阵列,用于单端口进入手术和自然孔手术的机器人。成功案例包括授权给行业的蛇形机器人技术,视网膜微手术技术(导致AURIS Surgical Robotics Inc.成立),IREP单端口手术机器人(已获得Titan Medical Inc.许可并用作研究) Titan SPORT(单孔口机器人技术)的原型。

微信扫一扫
关注该公众号

好的文章,需要您的鼓励
0

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
ATI 工业自动化有限公司
 6年
6年



- 2024-01-19 15:13:40
- 2024-11-16 15:59:27
- 2022-11-08 13:31:38
- 2024-02-15 15:29:40
- 2023-11-03 11:25:55
- 2023-10-07 15:22:01
- 2023-05-07 17:10:00
- 2023-05-08 10:11:12
- 2022-10-26 11:04:04
- 2023-04-19 07:18:28
- 2022-10-11 17:07:31
- 2023-04-22 10:41:59
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









