





机器人通过仿真演示来学习不同的运动行为

机器人是我们未来的重要组成部分,世界各地的研究人员一直在努力实现腿式机器人的平滑运动风格。 来自苏格兰爱丁堡大学的一组研究人员已经建立了一个框架,用于训练人形机器人通过人类演示像人一样行走。
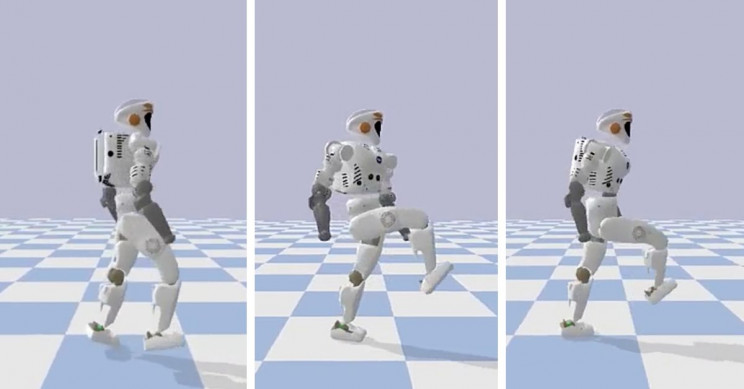
在arXiv上预发表的一篇论文中提出的这个新框架将模仿学习和深度强化学习技术与机器人控制理论相结合,以实现人形机器人的自然运动和动态运动。
“我们着手研究的关键问题是如何将(1)机器人 运动中的有用人类知识 和(2)模仿人类的运动捕获数据纳入深度强化学习范例,以更有效地提升有腿机器人的自主能力,” Chuanyu这项研究的研究人员之一,杨告诉TechXplore。我们提出了两种将人类先验知识引入DRL框架的方法。”
团队设计的框架基于独特的奖励设计,该设计使用人类步行的运动字幕数据作为训练参考。另外,它利用了两种专门的分层神经架构,即相功能神经网络(PFNN)和模式自适应神经网络(MANN)。
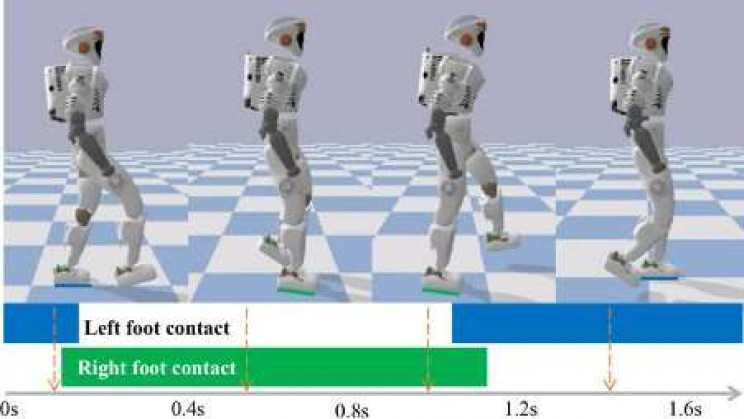
Yang解释说:“复制类似人的运动方式的关键是引入人的行走数据,作为学习代理模仿的专家演示。” “奖励设计是强化学习的重要方面,因为它支配着代理的行为。”不禁会让人想到训练狗去执行技巧动作并随后用骨头奖励它的相似之处...
关于团队框架的一个好消息是,它甚至使人形机器人能够在不平坦的地面或外部推动下进行操作。研究人员收集的发现表明,专家演示(在此示例中为人类行走的镜头)可以显着增强深度强化学习技术,以针对不同的运动风格训练机器人。最终,他们提出的新框架可用于训练类人机器人,使其以与人类相似的方式更快,更高效地行走,同时还实现更自然和类似人类的行为。
目前,Yang和他的同事们只在仿真中评估了他们的框架,因此他们现在计划研究将其从仿真环境转移到现实环境的方法。他们最终希望在真正的人形机器人上实现它,以便进一步评估其有效性和可用性。
杨说:“在未来的工作中,我们还计划扩展学习框架,以模仿更加多样化和复杂的人类运动,例如横跨运动,操纵和抓握的一般运动技能。” “我们还计划研究有效的从仿真到现实的策略传输,以实现对真正机器人的学习策略的快速部署。”

好的文章,需要您的鼓励
15

- 最新资讯
- 最新问答
-
“机器人关节”被TA硬控了
关键字: 美的工业 rv减速机 2024-10-16 -
未来已至:Figure 02机器人引领AI硬件新时代
关键字: 人形机器人 2024-08-13 -
配天观点:具身智能商业化落地之路,道阻且长,但行则必至!
关键字: 配天 具身智能 2024-08-09 -
具身智能:人工智能新纪元,赋能未来科技新引擎
关键字: 具身智能 泰科机器人 2024-07-25 -
科技与艺术交融,BrainCo智能仿生手亮相北京中国国家博物馆丨设计智造与高质量发展特展
关键字: 强脑科技 智能仿生手 2024-07-22
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2024-08-09 15:55:07
- 2022-01-12 09:56:12
- 2019-12-20 17:31:37
- 2019-03-25 14:41:44
- 2019-07-05 13:37:10
- 2019-02-27 16:02:02
- 2024-10-16
- 2024-08-13
- 2024-08-09
- 2024-07-25
- 2024-07-22
- 2024-07-18
- 2024-07-18
- 2024-07-18
- 2024-01-29
- 2024-01-16









