





仿果蝇无人机DelFly Nimble登上了《Science Robotics》的封面

今天为大家介绍一款真正用翅膀起飞的无人机,据悉是以果蝇为灵感开发的,大家一定很好奇吧。
看它舞动着透明的翅膀,一溜烟飞走了,有没有想起一种我们都讨厌的小动物。

夏天的时候,大家最讨厌的应该就是果蝇了,飞得贼快,拿着苍蝇拍悄悄的接近它,眨眼间就逃走了。不过果蝇飞行的稳定性和敏捷性成为了科学家开发无人机的灵感。
这是荷兰代尔夫特理工大学的微型无人机实验室(MAVLab)在2018年的作品,仿果蝇无人机——DelFly Nimble,通过拍打翅膀飞行,长为33厘米,重29克。当时DelFly Nimble在IMAV 2018室内竞赛中还获得“最具创新性设计”奖,登上了《Science Robotics》的封面。
最近,MAVLab公布了DelFly Nimble的最新视频,可完成多种飞行和避障任务。令人眼前一亮的还有它的续航能力,在充满电的电池上可以飞行超过1公里的距离,并能够携带4克的额外有效负载。
遵循预定的飞行路线飞行:
通过障碍物:
通过多个圆形“窗户”:
拍打翅膀实现多种飞行任务
和果蝇一样,DelFly Nimble具有一对翅膀,包括两个机翼拍打机构,由透明的聚酯薄膜制成,每秒拍打17次,从而产生飞行所需的升力。
不仅如此,还可以通过机翼的微小调整来控制前后和侧向飞行,甚至在空中转个360度的圈:
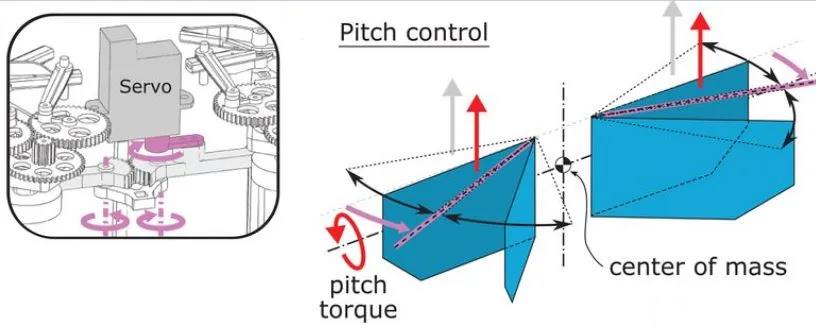
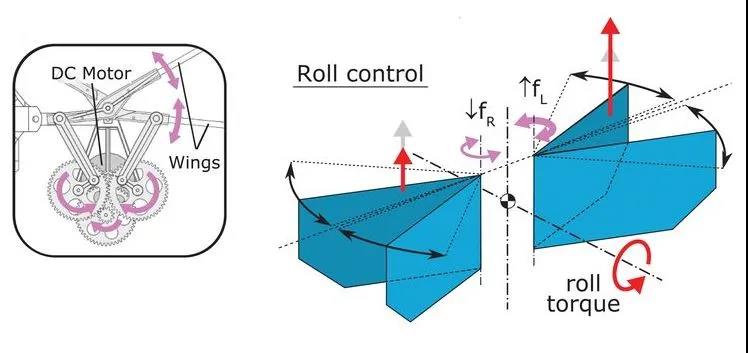
DelFly Nimble通过旋转伺服致动器实现各个方向的俯仰、偏航和滚动。
俯仰:
通过调节二面角(翅膀的中线)来产生俯仰转矩,该二面角相对于质心向前或向后移动两个翼对的翼拍平均推力矢量。
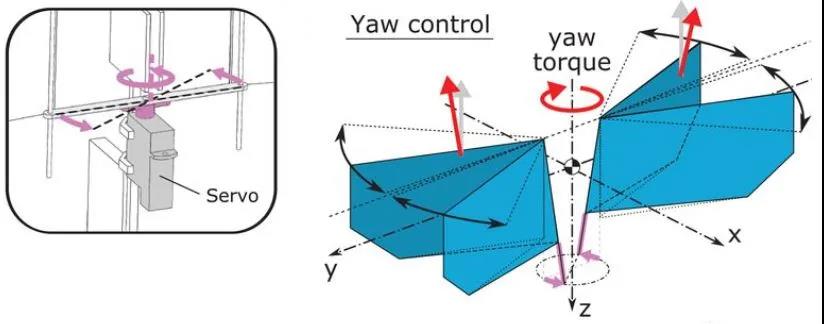
偏航:
通过致动一对翅膀的根部伺服致动器来实现偏航,通过改变两个拍打机构的相对方向来调节,使得它们各自的机翼拍打平均推力沿相反的方向倾斜,从而产生围绕偏航轴的扭矩。
滚动:
通过以不同的拍打频率驱动两个机翼对来实现滚动,这会导致推力差,从而围绕滚动轴产生扭矩。
没有尾巴也能保证稳定性
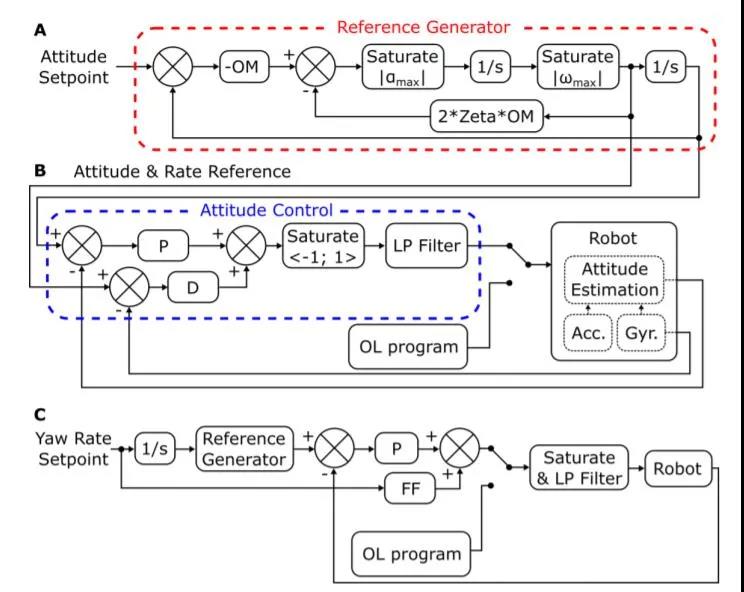
与果蝇不同的一点在于,DelFly Nimble没有尾巴来保持稳定性,依靠主动稳定功能,由车载自动驾驶仪(STM32微控制器,MPU60006DOF IMU)和Paparazzi UAV软件实现。

研究人员采用了具有比例(P)和微分(D)项的姿态反馈控制,从姿态设定点产生参考,姿态设定点均由自动驾驶仪中的预编程序列确定,以确保多次飞行的一致性,这使所有果蝇启发的动作都是由无人机完全自主执行的。在Paparazzi UAV软件中姿态稳定的标准实现的基础上,研究人员还向控制器输出添加了一个低通滤波器(二阶Butterworth),以减少伺服执行器命令中的噪声量。
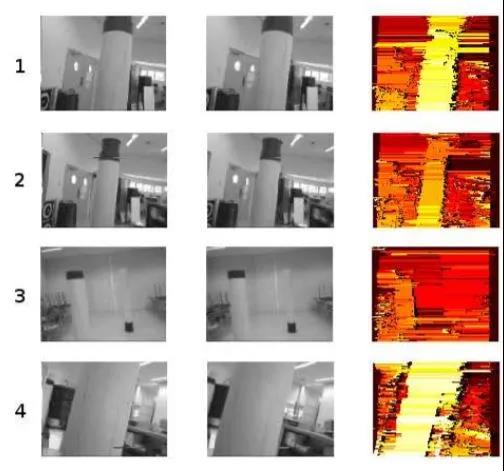
DelFly Nimble带有实时视频输入的摄像系统,并通过一种叫做LongSeq的视觉算法来躲避障碍,支持图像行中具有恒定视差的长序列,即使在像素不好的情况下也不会对匹配质量造成影响。
看完这款无人机,小编觉得果蝇也没有那么讨厌了。
除了对生物研究有利外,在无人机领域,DelFly Nimble所具有的高效飞行能力和灵活的操纵性,可以让我们看到未来,昆虫仿生无人机或许会比现在的旋翼无人机更有前途。使用现有工艺和组件,DelFly Nimble 机器人制造成本也相对低廉。
目前DelFly Nimble的开发仍在继续,一起期待它未来的表现吧。

好的文章,需要您的鼓励
19

- 最新资讯
- 最新问答
-
“机器人关节”被TA硬控了
关键字: 美的工业 rv减速机 2024-10-16 -
未来已至:Figure 02机器人引领AI硬件新时代
关键字: 人形机器人 2024-08-13 -
配天观点:具身智能商业化落地之路,道阻且长,但行则必至!
关键字: 配天 具身智能 2024-08-09 -
具身智能:人工智能新纪元,赋能未来科技新引擎
关键字: 具身智能 泰科机器人 2024-07-25 -
科技与艺术交融,BrainCo智能仿生手亮相北京中国国家博物馆丨设计智造与高质量发展特展
关键字: 强脑科技 智能仿生手 2024-07-22
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2024-08-09 15:55:07
- 2022-01-12 09:56:12
- 2019-12-20 17:31:37
- 2019-03-25 14:41:44
- 2019-07-05 13:37:10
- 2019-02-27 16:02:02
- 2022-09-01 15:24:48
- 2024-10-16
- 2024-08-13
- 2024-08-09
- 2024-07-25
- 2024-07-22
- 2024-07-18
- 2024-07-18
- 2024-07-18
- 2024-01-29
- 2024-01-16









