





SPS 亮点 | “温柔”抓取工件的EGI智能电动机械手

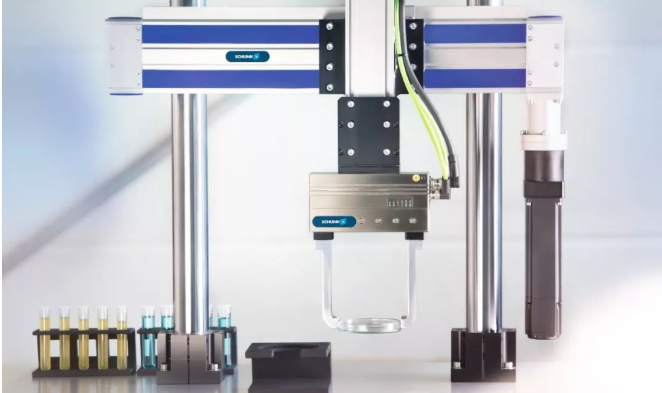
试管、注射器、玻璃器皿等脆弱、脆弱的部件一直是工业机器人应用的难点——如果夹紧力度稍有偏差,产品损坏率会大大提高。然而,在抓取系统和夹紧技术的先驱雄克看来,克服问题,开拓新的机器人领域,正是他们的使命!
11月26日至28日,雄克小型电动机械手EGI是在德国纽伦堡举办的工业自动化SPS展览会上展出的关键新产品之一。这款小型工件捕获机械手是市场上最简单、最容易使用的机电一体化机械手之一,能够胜任电子、制药和实验室等应用中的困难处理任务。雄克EGI有什么优点?下面是给你的。
实现智能抓取的两项功能
雄克小型机械手EGI配有标准PROFINET接口和24V技术,行程57.5毫米,抓取力达到100N。不仅如此,便于调试的集成网络服务器和夹持力保持更加方便可靠。
Web服务器集成
虽然EGI有很多功能,但调试非常简单。这是因为EGI机械手集成了Web服务器。只要你连接到任何标准的浏览器,你就可以编程所有的基本功能,而不需要任何额外的软件。
当然,无论智能设计多么精致,都很难保证以防万一。EGI机械手设置了点动模式:一旦紧急停止,夹爪可以手动控制移动。
夹持力保持
与市场上提供的传统机电机械手相比,EGI机械手的另一个优点是保持夹紧力。当紧急停止或停电时,EGI可以保持原来的位置,保持抓取力,避免工作部件的丢失或损坏。
针对高要求行业的五大应用领域
雄克机械手EGI具有高度灵活、可调节的行程和安全可靠的性能,在实验室自动化、医疗与制药、智能工厂等多个领域具有无可比拟的优势。
实验室自动化
EGI机械手在移动试管、培养皿、注射器等实验室设备时,抓取力灵活可调,部件可安全抓取。EGI可以在预设后捕获不同直径的零件。
自动化医疗和制药
制药行业的部件,如套管、注射器和安瓿瓶,在加工过程中不会变形。具有灵敏抓取力的EGI,针对严格的加工要求,仍然具有灵活性和安全性。
电子产品行业
EGI可用于多尺寸、高度动态的电路面板处理,单指57.5毫米长行程和快速预定位的机械手指。
生产自动化
EGI机械手的坚固设计使其同时适用于工业生产,其可变行程与摄像系统相结合,可以完成箱内取物的任务。
智能工厂
EGI机械手配备标准PROFINET接口,满足智能工厂高性能应用的前提。检测和控制、收集、存储和评估工件和工艺数据,以及机械手的中间位置和特殊参考点。
雄克小型电动机械手EGI设计智能、灵敏、方便,不仅使小型工件捕获简单可行,而且在自动化和智能领域得到更广泛的应用。未来,雄克将继续关注工业4.0的发展,促进智能设备的研发,为客户提供更准确、可靠、灵活的系统捕获解决方案。

好的文章,需要您的鼓励
10

- 最新资讯
- 最新问答
-
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17
-
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00


- 2016-12-08 07:39:11
- 2015-03-27 08:00:00
- 2016-03-09 08:00:00
- 2015-09-01 08:00:00
- 2023-03-06 16:00:33
- 2019-03-12 10:04:58
- 2023-01-16 20:46:23
- 2024-02-01 10:05:01
- 2023-05-31 15:03:04
- 2023-05-17 13:03:00
- 2023-05-04 18:04:38
- 2023-04-13 20:23:03
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18









