





KUKA机器人坐标系

KUKA机器人的坐标系可分为四种:
JOINT坐标系统 : 每个设备轴线在正负方向上可以单独移动。
WORLD坐标系统 :固定的,直角坐标系统其原点位于设备的底座。
BASE坐标系统 :直角坐标系统其原点位于所加工的工件上。
TOOL坐标系统 :直角坐标系统,其原点位于工具上。
KUKA机器人微动模式的选择可分为两种:
参考坐标系只能在微动模式下改变。
在左上角显示的“Jog mode”(微动模式)状态键必须显示“Space mouse手轮”或者“Jog keys微动键”
选择所需求的坐标系---重复按下下图所指示KCP上的状态键直到出现所要求的坐标系符号为止。
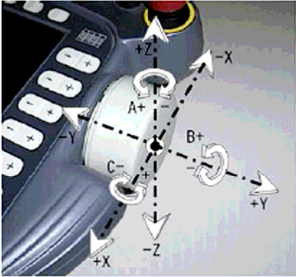
JOINT坐标系统
在JOINT坐标中,每一机械轴线可以单独在轴线的正负方向移动。可以使用微动键或手轮。 手轮允下列微动键/手轮的运动能使每个轴线单独移动。



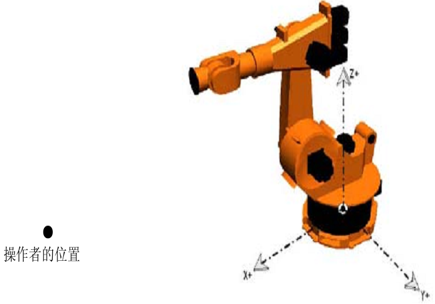
WORLD坐标系
WORLD参考坐标轴系统是绝对坐标(固定不变),直角坐标,笛卡儿坐标系,其原点一般于工件内部。当设备移动时参考坐标系的原点保持在同一位置,既不随设备移动而移动。 在交货时,WORLD 坐标系原点位于设备的底座上。

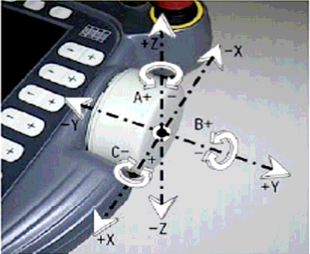
BASE坐标系
BASE 坐标系是直角坐标,笛卡儿坐标系,其原点位于外部工具。例如:可能 是焊枪。如果你已经选择了此系统作为参考坐标系,设备运行与工件轴线平行。BASE 坐标系只有在下面情况下移动:工件固定在与算术关联的外部运动系统上交货时,BASE坐标系原点位于设备的底座上。



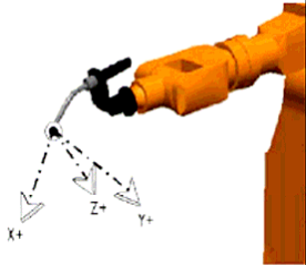
TOOL坐标系
TOOL坐标系是直角坐标,笛卡儿坐标系,其原点位于工具上。坐标系一般X轴定向与工具工作方向一致。
TOOL坐标系不断地跟随工具的运动。
交货时,TOOL的坐标系的原点位于设备凸缘的中心


好的文章,需要您的鼓励
14

- 最新资讯
- 最新问答
-
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17
-
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00


- 2015-08-07 08:00:00
- 2016-07-13 00:00:00
- 2018-12-06 11:47:31
- 2016-07-15 00:00:00
- 2016-07-25 00:00:00
- 2015-08-07 08:00:00
- 2022-08-03 10:20:40
- 2018-09-11 10:05:45
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18









