




2018工博会实况—艾利特机器人让“智”造无处不在

2018年9月19日—23日,有着“工业风向标”之称的第20届中国国际工业博览会在上海虹桥国家会展中心隆重举办。适逢创办20周年,工博会已逐步发展成亚太地区最具影响、最具权威的国际性工业博览会,是展示全球先进制造业发展和最新科技成果的舞台。

作为国产工业机器人民族品牌的代表性企业之一,艾利特机器人精彩亮相工博会7.1H C097展位,共分为五大主题展区,包括:协作机器人专区、工业机器人专区、新零售应用解决方案、智能工厂解决方案和智能物流解决方案,集中展示了8个演示单元,共计15台各型机器人。工博会进程过半,下面就跟随小编的步伐一起走进艾利特展位一探究竟。

↓ 艾利特展台亮点播报 ↓
参观者络绎不绝,人气爆棚
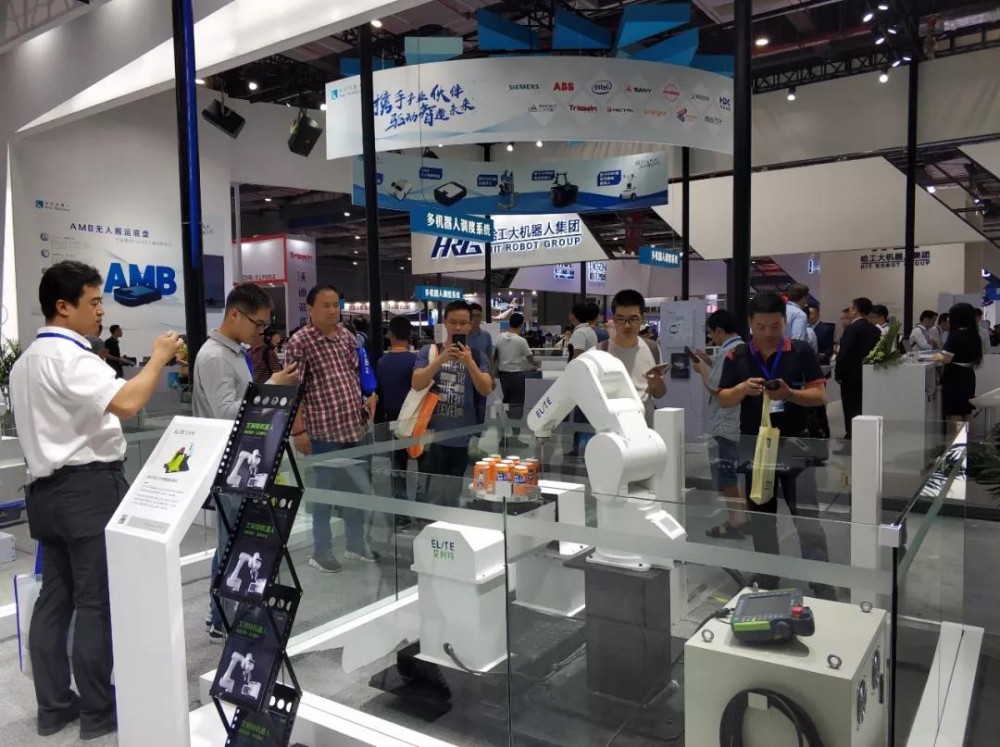
无人咖啡师大显身手



现磨咖啡 浓郁醇香
面向新零售行业,艾利特为无人水吧、无人餐馆等场景提供人机关系优化的协作机器人、工作效率优化的工业机器人、工装夹具及电子点餐系统。以无人咖啡店为例,客户可在自助终端选择多种口味的饮料,通过支付系统付费后,由机器人实现取杯、接咖啡、取盖、盖盖等动作,全过程不需人工参与。
机加自动化产线
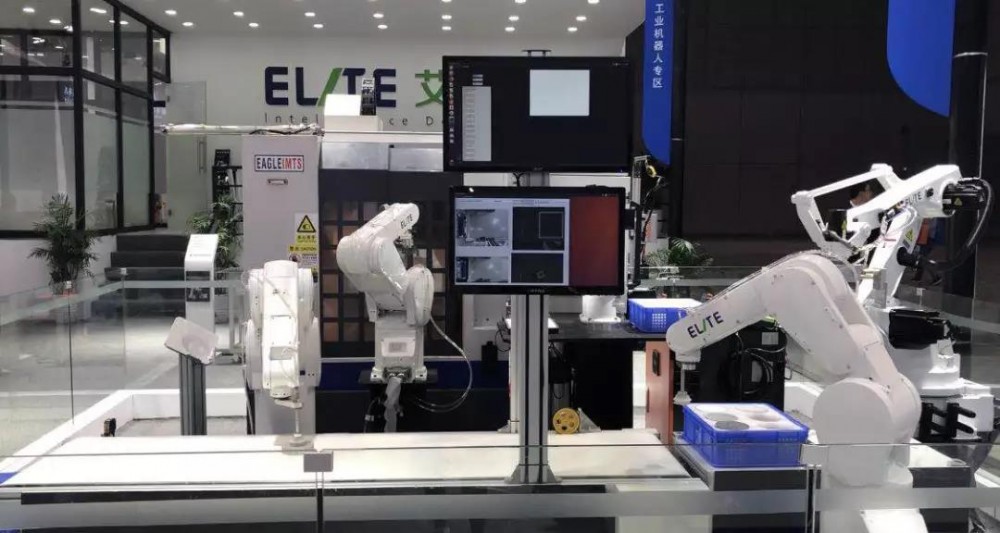

面向机械加工行业,艾利特推出以机器视觉、多种型号机器人协同为核心的全自动化柔性生产线解决方案。自动完成原材料的拆跺、传带传输、机器视觉上料、机床加工、下料、机器视觉质检、码垛等流程,具有安全、稳定、可靠、高效、柔性、运营成本低等优点,为制造业企业升级打下坚实基础。
全闭环动力学前瞻插补算法
全闭环动力学前瞻插补算法,是艾利特自主研发的,继加加速度前瞻和微段自适应速度控制之后的第二代插补算法。该算法融合轨迹误差控制、机器人动力学、电机实时力矩反馈、电机实时位置反馈等信息,在保证轨迹精度的前提下,令任意时刻均有一轴能发挥最大性能,极大缩短了节拍时间。同时,本次展示中该算法继续进化,增加对外部轴的支持。
六维传感器精准拖动示教

针对机器人示教难的问题,艾利特在传统的动力学加电机电流检测的拖动示教技术之外,新添加了基于无线六维运动传感器的拖动技术。该技术有效解决了因电机电流检测精度有限、摩擦力模型和参数难于精确获得而造成的拖动灵敏度不佳的问题,在拖动精准程度上达到传统的示教器手动操作水平。同时,与安装专用六维力传感器的技术相比,该技术硬件成本大幅降低、几乎不占用末端负载能力、且安装/拆卸简单。
激光跟踪自适应焊接
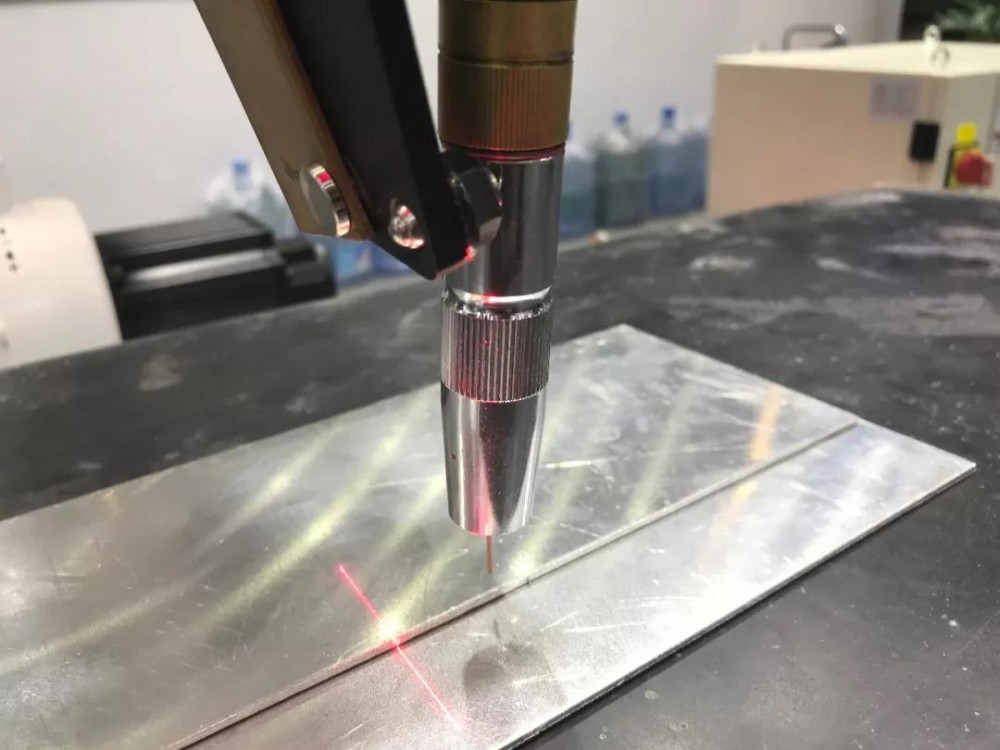
针对传统机器人焊接工艺中,工件自身一致性及工件固定位置一致性不佳造成的实际焊接轨迹与目标轨迹有偏差的问题,艾利特推出基于传感器与运动控制技术相结合的激光传感器焊缝实时跟踪系统。该系统涵盖了激光传感器标定技术、焊缝起始点动态寻位技术、实时焊缝跟踪技术以及焊缝结束点处理技术,操作简便、轨迹跟踪精度高、可实现复杂焊缝轨迹的实时跟踪,有效提高了焊缝轨迹精度。
小工件高速焊接系统

面向小件、高速、高精焊接市场,艾利特推出全国产小型高速焊接机器人系统。该系统以小型高速机器人为基础,与常规的全国产1.4米焊接机器人相比,运动速度提高30%、综合工作效率提高20%、安装方式灵活,吊装配合导轨可满足超大型、超复杂结构件焊接。
混杂无序分拣及拆零拣选


面向仓储物流行业,艾利特推出基于深度学习、2D/3D传感器及数据融合、自动避障的混杂无序分拣及拆零拣选方案。该方案可从若干种物体中快速、准确地识别、抓取某一种物体,支持2cm至100cm见方尺寸内的物体,支持纸箱纸、塑料、橡胶、塑料袋等包材,并可在极短时间内增加新种类。
随机混杂物体抓取
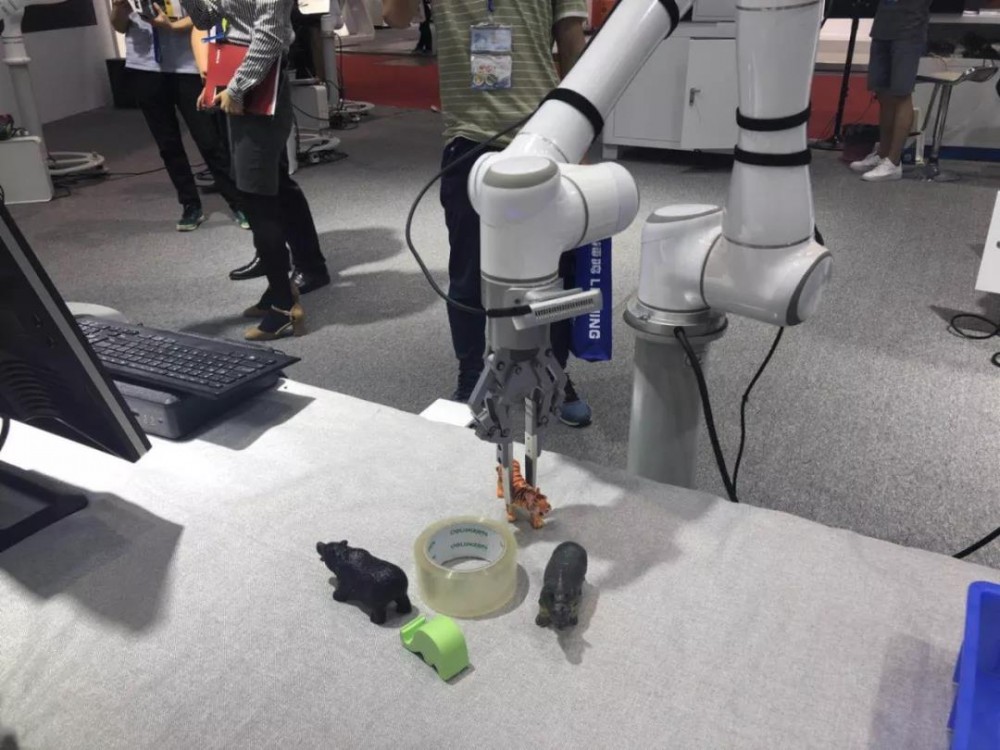
面向通用物体抓取场景,艾利特推出以3D视觉深度神经网络、2指灵巧抓手为核心的随机混杂物体抓取解决方案。该方案完全不需要离线获取、处理物体外形信息,即可实现对任意物体的抓取(尺寸不能超过抓手适用范围),可广泛用于机加、3C、物流、零售等行业。

好的文章,需要您的鼓励
9

- 最新资讯
- 最新问答
-
WAIC 焕新之旅:卓益得多重突破启新程
关键字: 卓益得 2025-07-28 -
WAIC 2025世界人工智能大会7月26日开幕,展商名录布局图预览
关键字: 世界人工智能大会 2025-07-21 -
VisionChina2026(上海)机器视觉展焕新登场,报名抢占黄金展位!
关键字: 机器视觉展 2025-07-18 -
抢先剧透!电力机器人专区震撼来袭,邀您共探数字化运维新生态
关键字: 电力展 2025-07-18 -
励展博览集团与机器视觉产业联盟(CMVU)关于VisionChina(深圳)达成战略合作
关键字: 机器视觉 2025-07-11
-
焊接机器人系统组成有哪些?
标签: 焊接机器人,机器人系统 提问:李子 2025-07-24 14:02:05 -
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00


- 2020-09-02 06:55:35
- 2024-09-20 16:15:30
- 2020-09-14 13:19:01
- 2016-11-01 00:00:00
- 2018-08-16 15:45:24
- 2020-09-27 09:15:07
- 2023-01-27 11:43:58
- 2022-08-04 19:23:47
- 2018-09-19 14:15:40
- 2018-09-11 18:50:56
- 2018-09-19 07:45:14
- 2018-09-19 09:25:53
- 2025-07-28
- 2025-07-21
- 2025-07-18
- 2025-07-18
- 2025-07-11
- 2025-07-09
- 2025-07-03
- 2025-07-01
- 2025-06-25
- 2025-06-06









