




-
焊接机器人工作中焊接易出现的问题?
提问:冬瓜 | 时间:2022-09-06 13:20:34
标签:焊接机器人
回答者:机器人在线 | 时间:2022-09-06 13:49:21
焊接机器人工作中焊接易出现的问题?由于人工焊接劳动强度大,工作环境恶劣,从事焊接行业的人越来越少,增加了企业招聘的难度。同时焊接操作人员技能术质量不能统一,质量不能完全控制。因此,使用机器人焊接而不是人工焊接是焊接企业的发展趋势。工业机器人可以在恶劣的环境下进行连续的焊接操作,使用机器人焊接,可以为企业节省大量的劳动力成本。所以,在使用焊接机器人时会容易出现哪些问题?如何解决问题?我给您讲解一下:
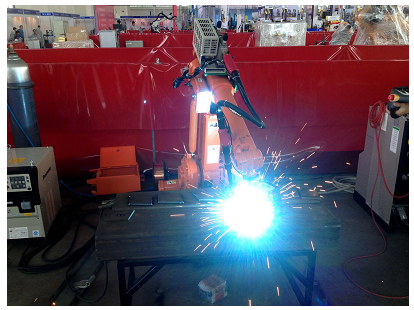
(焊接机器人)
一:机器人焊接偏焊问题
人工焊接时,通过人眼观察实时改变焊缝轨迹。机器人焊接时,焊接机器人的轨迹一般通过机器教学完成的。教学完成后的程序是固定的。如果工件的装甲位置没有偏移,可能是焊接机器人造成的。TCP坐标定义不准确,一般焊接机器人TCP坐标定义在焊枪末端。如果坐标系标定时有偏差,将导致焊接机器人轨迹的变化。导致偏焊的发生。解决这个问题的方法是重新校准焊接机器人的工作坐标系,每个品牌的焊接机器人的工作坐标系TCP标定方法会有所不同。具体如体校准,可查阅相关机器人说明书。
二:机器人焊接时出现咬边的现象
出现咬边的现象,可能是焊接机器人的焊机参数设置不当。如焊接电流,焊接电压等参数。可以通过合理调整零件的特性来解决。另一种情况是,焊枪和焊缝的位置、角度和距离显示,焊枪的位置有偏差,角度太大或太小,焊枪与焊缝之间的距离与所用焊丝的直径不匹配,会造成咬边现象,在焊接机器人编程过程中,控制位置、角度和距离,以避免焊接时咬边。
三:出现气孔和飞溅过多
气孔可能是气体保护不良,工件底漆太厚或保护气体不够干燥,可以相应调整。机器人焊接时飞溅过多,可能是焊机参数选择不当或焊丝伸长过大。此时,可以适当调整焊机参数,调整气体比例。



-
- 关于我们
- 注册新用户
- 会员登陆
- 使用协议
- 联系我们
- 诚聘英才
-
![]()
-
![]()
-
![]()
-
![]()
沪ICP备20024386号-2 沪公网安备 31011402005348
copyright © 机器人在线版权所有. all right reserved.




- 手机站:http://m.imrobotic.com/
- 电 话:400-681-0860
- 邮 箱:sales@imrobotic.com
- 上海市嘉定区翔江公路485号7号楼
-
![]()
服务号:imrobotic
-
![]()
订阅号:im_robotic

