




-
自动焊接机器人调试教程?
提问:小滨 | 时间:2022-09-16 13:30:47
标签:焊接机器人
回答者:机器人在线 | 时间:2022-09-16 14:19:58
自动焊接机器人调试教程?自动焊接机器人在在许多地方使用。你知道如何解决使用中的问题吗?无论什么机器都需要在早期阶段进行调整,你知道在调整过程中出了什么问题,在哪里进行调整吗?让我详细介绍一下焊接机器人的调试教程。
一、自动焊接机器人调试方法:
1.咬边可能是选择焊接参数不当、焊枪视点或焊枪方向错误,可适当调整功率尺寸,改变焊接参数,调整自动焊接机器人的焊枪姿势和焊枪和工件的相对方向。
2.显示焊接偏差可能是焊接方向不正确或焊枪寻找问题。此时,要考虑TCP(焊枪中心点方向)是否准确并进行调整。如果经常出现这种情况,就要检查机器人各轴的零方位,从零开始校正。
3.气孔可能保护气体不良,工件底漆过厚或保护气体不干燥,可处理主动黄连接机器人的相应调整。
4.飞溅过多可能是由于黄色参数选择不当、气体成分或焊丝伸长长度,可以调整功率尺寸,调整混合气体比,调整黄色枪和工件的相对方向。
5.在外冷却后形成一个弧形坑,在编程过程中增加埋弧坑的功能,可以填补。
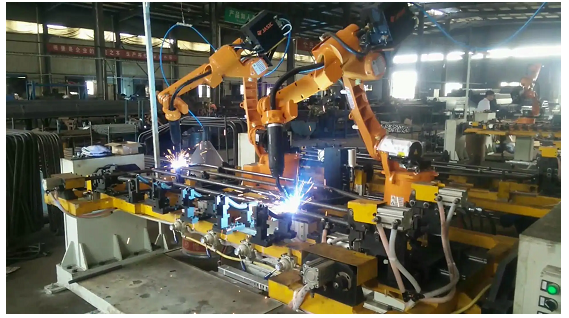
(自动焊接机器人)
二、自动焊接机器人操作教程:
自动焊接机器人该如何操作?引进焊接机器人有助于提高生产效率,与企业生产线同步运行,提高产品合格率,加快转型升级。要使自动焊接机器人在保证生产效率的基础上稳定质量,需要合格的操作人员进行操作。对于新手,我将带您总结如何更快地操作自动焊接机器人。
首先要了解焊接机器人的运动特性和结构。焊接机器人的运动特性是了解焊接机器人的运动轨迹。在正常工作下的运动路径,有利于焊接参数的正确编制。该结构主要包括控制机构、执行机构和机器人本体。控制机构和人脑一样,控制整个机器人的运行,执行机构负责操作指令,机器人本体是焊接机器人的框架部分。
其次,焊接机器人启动前需要离线编程。在编程过程中,我们需要掌握焊接机器人起点的运动。设置运动焊点时,应根据运动轨迹进行设置。我们知道,在焊接完成后,我们将返回到终点位置,从而完成完整的运动轨迹,输入编程数据并启动机器人进行操作。
第三,在焊接操作过程中,检查机器人本体及附件是否正常,各轴配合是否灵活,检查电流、电压和焊接电源是否在正常值范围内,并使用开环系统进行焊接。焊接工作开始后,人员需要远离活动范围,远程人员手持指示器监测焊接质量和本体操作。
最后,焊接工作完成后,人员需要将夹具放回原位置,清理焊接机器人表面和焊接枪杂质,以便在下一个工作开始时不影响焊接过程,操作人员也需要做日常维护,但需要注意焊接机器人,需要佩戴良好的防护装备!



-
- 关于我们
- 注册新用户
- 会员登陆
- 使用协议
- 联系我们
- 诚聘英才
-
![]()
-
![]()
-
![]()
-
![]()
沪ICP备20024386号-2 沪公网安备 31011402005348
copyright © 机器人在线版权所有. all right reserved.




- 手机站:http://m.imrobotic.com/
- 电 话:400-681-0860
- 邮 箱:sales@imrobotic.com
- 上海市嘉定区翔江公路485号7号楼
-
![]()
服务号:imrobotic
-
![]()
订阅号:im_robotic

