




-
AGV导航方式区别有哪些?
提问:土豆 | 时间:2022-12-09 09:05:05
标签:AGV,导航方式,区别
回答者:智能小助手 | 时间:2022-12-12 10:01:28
早期的AGV大多使用磁带或电磁导航。这两种方案原理简单,技术成熟,成本低,但很难改变或扩展路径和后期维护。AGV只能在固定路线上行走,无法实现智能避让,也无法通过控制系统实时改变任务。
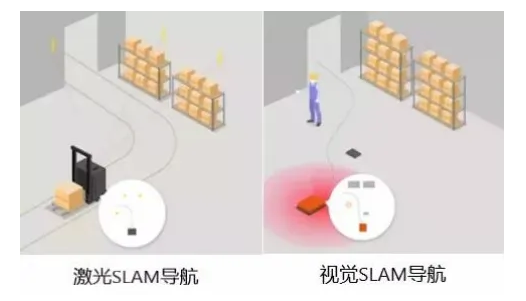
(AGV导航方式)
目前,AGV的主流导航模式是二维码+惯性导轨,相对灵活,易于铺设或更改路径,但路径需要定期维护。如果网站很复杂,应经常更换二维码。此外,陀螺仪的精度和使用寿命也非常严格。
随着SLAM算法的发展,SLAM已成为许多AGV的先进导航模式,这是制造商的首选。SLAM模式不需要其他定位设施,其形式和路径灵活,可以适应各种现场环境。相信随着算法的成熟和硬件成本的压缩,SLAM无疑将成为未来AGV的主流导航模式。
它可以分为激光SLAM(2D或3D)和视觉SLAM。
Visual SLAM仍处于进一步研发和应用场景扩展阶段。SLAM因其信息量大、应用范围广等优点而受到广泛关注。然而,这种算法对处理器的要求很高,通常需要准桌面CPU甚至GPU。然而,大多数AGV嵌入式处理器被使用,因此很难在短时间内将小型处理器用于AGV大型应用设备。
激光SLAM比视觉SLAM更早开始。理论和技术相对成熟,验证了其稳定性和可靠性。处理器的性能要求远低于视觉SLAM。例如,主流激光SLAM可以是普通的ARMCPU实时操作。目前,一些AGV是基于激光的,制造商已经推出了SLAM导航产品。毫无疑问,激光SLAM在一段时间内仍然是主流的SLAM方案。
导航和导航技术一直朝着更灵活、更准确、更适应的方向发展,对辅助导航标志的依赖越来越少。SLAM,一种由实时定位和地图构建的自由路径导航模式,无疑是未来的发展趋势。我相信,在不久的将来,5G、AI、云计算、物联网技术和智能机器人之间的互动和融合将赋予AGV行业巨大的变化。SLAM导航模式具有更高的灵活性、更高的精度和更强的适应性,也将更适应复杂多变的动态工作环境。在多学科共同发展之后,未来会有更多高端的AGV导航技术。



-
- 关于我们
- 注册新用户
- 会员登陆
- 使用协议
- 联系我们
- 诚聘英才
-
![]()
-
![]()
-
![]()
-
![]()
沪ICP备20024386号-2 沪公网安备 31011402005348
copyright © 机器人在线版权所有. all right reserved.




- 手机站:http://m.imrobotic.com/
- 电 话:400-681-0860
- 邮 箱:sales@imrobotic.com
- 上海市嘉定区翔江公路485号7号楼
-
![]()
服务号:imrobotic
-
![]()
订阅号:im_robotic

