




-
ABB工业机器人如何快速转到位置点?
提问:聪明 | 时间:2022-12-12 23:04:40
标签:abb,abb机器人,快速转到,位置点
回答者:问答小助手 | 时间:2022-12-13 11:24:12
如果美国工业需要将机器人从美国工业已知的位置移走,通常是一个运行操作的程序,然后在程序中编写一个动作句子,然后将机器人移到已知的位置。将机器人移动到点p10;ABB工业机器人如何快速转到位置点?
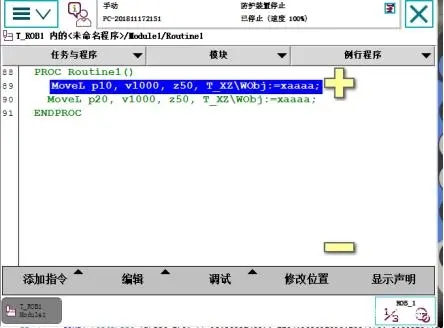
(ABB工业机器人)
在机器人技术的发展过程中,美国有一种方法可以将S生成到称为机器人的数据点。
1)将机器人学习界面的速度更改为处理界面,并启动“Go…”;
(2)查找将从过滤器按钮移动的p10点:
3)选择要移动的“p10”按钮,每次按下“启用”按钮,然后单击“开始”按钮。机器人可以携带p10点。
2.
首先,创建新路由,例如,在此处创建新路由rAbcd路由。
选择
从“文件”菜单中选择“复制行”
验证名称(与其他操作不同),确认要复制的内容(例如作业),验证迁移模块,然后单击确定。
复制完成
第一次,坐标系的工作部分必须安装在工作场所,并且坐标系统的工作部分也必须安装在正确的表面上。
然后选择行程。
选择坐标作为工作空间编号坐标。
按下激活按钮,按下开始按钮,它将垂直于动作的z轴。
3.老师们多久能找到?
美国工业对机器人有很大影响,有时很难削减菜单和调用。此时,添加过滤器函数以快速搜索定义。



-
- 关于我们
- 注册新用户
- 会员登陆
- 使用协议
- 联系我们
- 诚聘英才
-
![]()
-
![]()
-
![]()
-
![]()
沪ICP备20024386号-2 沪公网安备 31011402005348
copyright © 机器人在线版权所有. all right reserved.




- 手机站:http://m.imrobotic.com/
- 电 话:400-681-0860
- 邮 箱:sales@imrobotic.com
- 上海市嘉定区翔江公路485号7号楼
-
![]()
服务号:imrobotic
-
![]()
订阅号:im_robotic

