




-
机器人的移动底盘结构类型有哪些?
提问:小北 | 时间:2023-01-03 13:02:25
标签:机器人,移动底盘,结构类型
回答者:智能小助手 | 时间:2023-01-05 11:22:06
机器人底盘结构种类繁多,以下是四种常见类型。
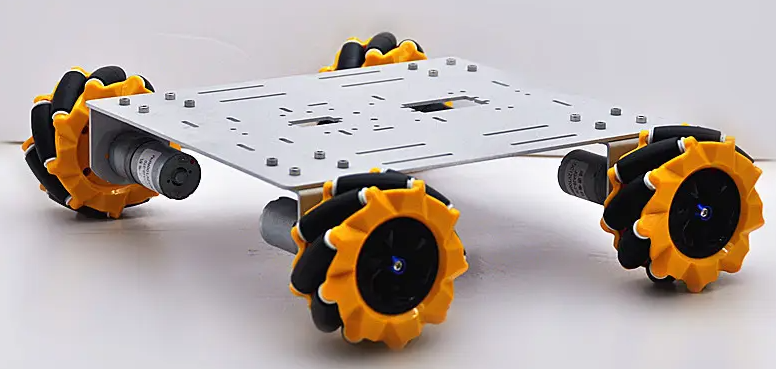
(机器人底盘)
1)脚足式
机器人脚底盘采用仿生技术,自由度高,适应性强,但通常结构复杂,难以控制。
2)车轮类型
轮式底盘包括两轮差速底盘、三轮全轮底盘、四轮全轮底盘,四轮车辆底盘(也称为四轮阿克曼底盘)、四轮滑动底盘等,一般根据地形选择不同的车轮尺寸和材料。生活中常见的汽车底盘是前轮转向和后轮驱动。S机器人是一个四轮全向底盘,独特的麦克纳姆车轮具有全方位移动的能力。
3)爬行器类型
履带式机器人底盘对路况的适应性很好,可以轻松跨越障碍物,但移动速度慢,不够灵活。坦克是履带式装甲战车。当车轮在轨道上滚动时,当遇到沙、雪、泥等复杂地形时,宽阔的轨道可以分散坦克的重量,使汽车很难落入其中。
4)球形
球形机器人具有良好的动态和静态平衡。封闭式底盘使其能够在无人驾驶、多尘、潮湿或腐蚀性环境中行驶。通常具有两栖功能,广泛应用于行星探测、环境监测、国防装备、娱乐等领域。



-
- 关于我们
- 注册新用户
- 会员登陆
- 使用协议
- 联系我们
- 诚聘英才
-
![]()
-
![]()
-
![]()
-
![]()
沪ICP备20024386号-2 沪公网安备 31011402005348
copyright © 机器人在线版权所有. all right reserved.




- 手机站:http://m.imrobotic.com/
- 电 话:400-681-0860
- 邮 箱:sales@imrobotic.com
- 上海市嘉定区翔江公路485号7号楼
-
![]()
服务号:imrobotic
-
![]()
订阅号:im_robotic

