
发布时间:2020年11月23日
依次通过添加AGV反光柱,扩展整个地图,直到维护完成所有反光柱位置。点击“保存”,系统会在运行程序同一文件夹下的Files文件夹内,自动存储LandMarks.csv文件。复制此文件到其他AGV的相同路径下,即可共用此地图。

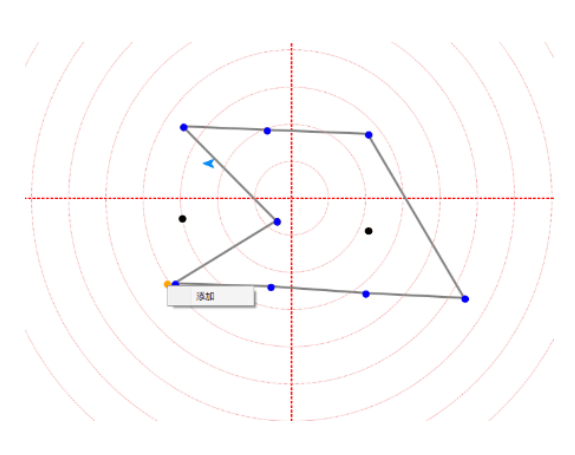
添加AGV反光柱分为2种情况:
1、添加单个AGV反光柱此情况通常发生在调试过程中,某些区域定位失败的情况下。通过右击需要添加的点,在弹出菜单中选择“添加”,等待10秒后操作完成;
2、添加多个AGV反光柱此情况通常发生在建图初期,完整的地图是由多次拼接而成的,每次拼接都要添加尽可能多的新反光柱,这个时候,通过点击“添加地图”,系统会自动将新扫描到的反光柱添加到已有地图。
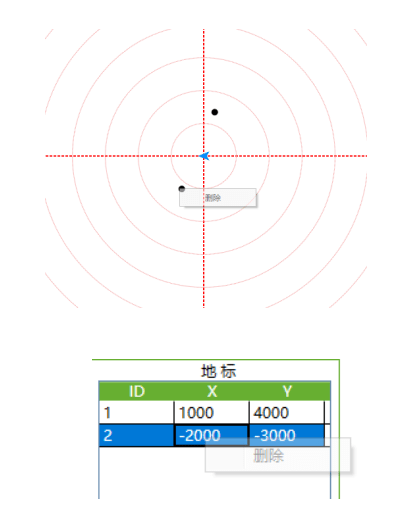
删除反光柱,一般发生在调试后期,部分反光柱需要移动位置或是移除,这时候就需要在已有地图中,删除已保存反光柱。可以通过以下两种方式:
1、鼠标右击已存在反光柱,在弹出菜单中选择“删除”,即可完成操作;
2、有的情况,已存在的点会被新计算的点覆盖到,不太容易能够选中想要的点。这时,可以通过选中左上角列表中对应信息,按下“Delete”键,即可完成操作;
沪ICP备20024386号-2 沪公网安备 31011402005348
copyright © 机器人在线版权所有. all right reserved.
服务号:imrobotic
订阅号:im_robotic
免费发布项目需求

专业顾问电话联系

分析明确需求并发布

集成商在线报名

需求方选择合适供应商

专人跟进项目进度

需求方确认方案供应商

了解更多

















