




【KUKA】微校第一课,从零点校正开启
时间:2019-03-26
阅读:11011

当您机器人所有轴运行到角度0°时,如果呈现过如下姿态,说明零点已经出现偏差。

错误的零点位置,将直接影响工具TCP的精确性,进而影响程序轨迹。

名词解释:工具TCP及其坐标系
由法兰坐标系为基础计算得来。
零点位置精确则工具坐标系也精确,反之亦然。
TCP精度影响直线、圆弧、样条曲线等轨迹精度。
精确零点校正不仅保证机器人程序轨迹的一致性,同时保证定位精确机器人或高精度机器人的绝对精度。
定位精确机器人需要较高的零点校正精度,以保证绝对精度。
零点校正三原理
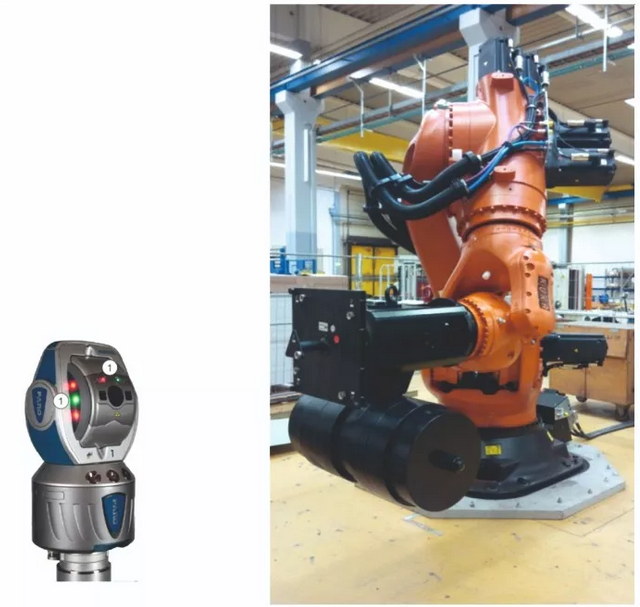
❶ 机器人各轴上的零点探头到达零点标记槽。(人工操作)

❷ 机器人设定各轴的角度。各轴校零角度由变量 $MAMES[] 决定。(机器人系统自动完成)

图说:根据零点探头及标记槽的位置不同,不同型号机器人的角度不尽相同。
❸ 记录校零当前电机角度。(机器人系统自动完成)
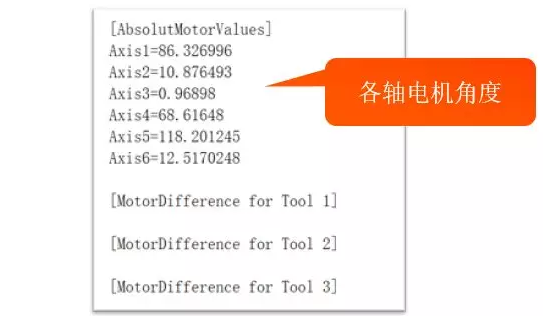
电机角度值将被存储到后台文件中,例如“653631.cal” (文件名为机器人序列号)
特别提示
● 零点校正需要借助工具千分表或者 KUKA EMD

注意:千分表校零点误差相对较大。人员测量误差、表针灵敏度等因素都会影响校零的精度。对程序轨迹要求较高时(如弧焊、折边等)不建议使用此方法。
● 某些型号机器人A6轴没有安装零点探头,校零点时需要对齐刻线,用“参考法”校零。
KUKA 微校正式上线了!四月,KUKA将继续为大家带来零点校正标准以及带负载两种不同的方法。
机器人
企业
技术干货

好的文章,需要您的鼓励
11

- 最新资讯
- 最新问答
-
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17
-
焊接机器人系统组成有哪些?
标签: 焊接机器人,机器人系统 提问:李子 2025-07-24 14:02:05 -
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2018-11-18 09:20:43
- 2018-08-21 08:25:11
- 2018-08-21 13:05:57
- 2022-11-09 17:03:03
- 2018-09-19 09:25:53
- 2022-08-03 10:20:40
栏目推荐
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18









