





【纳博特斯克】平面多关节机器人和精密减速机RV--机器人领域(二)

上期我们介绍了工业机器人领域中的多关节机器人,这期将围绕另外一款工业机器人—平面多关节机器人进行一个简单的介绍。
平面多关节机器人,又称SCARA机器人,是一种应用于装配作业的机器人手臂。它有3个关节。第一、第二关节为旋转关节,其轴线相互平行,在平面内进行定位和定向。第三关节是移动关节,用于完成末端件在垂直于平面的运动。SCARA系统在X,Y方向上自由度高,而在Z轴方向具有良好的刚度,此特性特别适合于装配工作,例如将一个圆头针插入一个圆孔,故SCARA系统首先大量用于装配印刷电路板和电子零部件;SCARA的另一个特点是其串接的两杆结构,类似人的手臂,可以伸进有限空间中作业然后收回,适合于搬动和取放物件,如集成电路板等。
如今SCARA机器人还广泛应用于塑料工业、汽车工业、电子产品工业、药品工业和食品工业等领域。它的主要职能是搬取零件和装配工作。它的第一关节和第二关节具有转动特性,第三关节可以根据工作的需要的不同,制造成相应多种不同的形态,并且一个具有转动、另一个具有线性移动的特性。由于其具有特定的形状,决定了其工作范围类似于一个扇形区域。
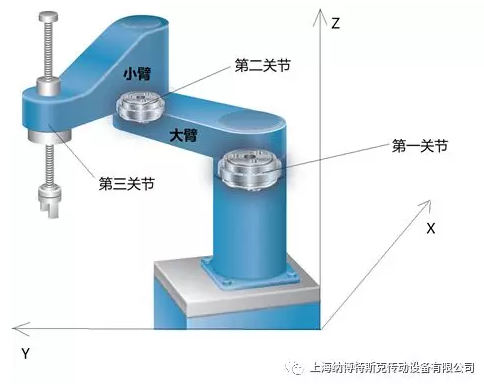
在机器人本体研发过程中,第1、2轴结构相同,都是伺服电机配减速机传动。减速机是一个非常关键的环节,是整个机器人机械部分研发的技术核心之一。在第一关节中,假如对SCARA机器人大臂弯矩要求比较高,一般会选用精密减速机RV。而在第二关节中,假如机器人小臂长度在1m左右、对小臂扭矩要求比较高时,通常也会选用精密减速机RV。相比谐波减速机,精密减速机RV的关键在于加工工艺和装配工艺。精密减速机RV具有承载力大、运动精度高、传动比大的特点,以及更高的疲劳强度、刚度和寿命,不会像谐波传动那样随着使用时间增长,运动精度会显著降低。
以上就是关于平面多关节机器人的介绍以及精密减速机RV的实际应用。下期将接着这个话题对坐标机器人进行探究,敬请期待。

好的文章,需要您的鼓励
13

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2020-08-19 11:01:30
- 2020-08-25 13:31:04
- 2020-06-18 11:10:51
- 2020-06-24 11:25:57
- 2020-07-01 10:26:05
- 2020-07-09 10:44:12
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









