





人工智能如火如荼,自主无人控制系统发展加速

8月12日,2019中国机器人学术年会在沈阳落幕。会议期间,中国工程院院士、同济大学校长陈杰发表了《自主智能无人系统优化与控制的几个问题》主旨报告。
全球人工智能发展如火如荼,自主无人控制系统研究持续加快
自主无人控制系统,是指智能地实现自治或协同,完成复杂任务的系统,具有自主性、智能性、协同性等特征。包括无人系统单体、集群无人系统和多集群无人系统等,被广泛应用在无人飞行器、无人车辆、无人船舶、工业机器人和服务机器人等领域。未来,自主无人控制系统将颠覆传统的战争规则,是保卫国家安全的重要武器,更是保证世界秩序的战略科技。
自主无人系统发展的一个重要基础,是人工智能。人工智能,是研究人类如何产生智能,然后让机器能够以人类智能相似方式做出反应,即具备认知、分析、推理、决策与控制等能力。人工智能的发展,为自主智能无人系统的发展提供了新的动能,自主智能无人系统是人工智能研究的重要抓手和极佳的验证平台,人工智能已经成为我国社会发展的新动能。
不只是中国,纵观全球,人工智能也在蓬勃发展。
近年来,欧洲的人工智能研究与应用持续升温。2016年3月,英国发布了《人工智能未来决策制定的机遇与影响》,2017年4月,法国指定了《人工智能战略》,2017年5月,德国颁布全球首部自动驾驶法律。
欧盟在人工智能技术发展和应用上多措并举,奋起直追,走出一条有别于美国的AI发展之路。英、法、德及西方主要国家都非常重视人工智能,积极将其应用于感知与信息处理、指挥决策、无人平台等社会经济科技和军事领域。2018年11月,德国发布了人工智能战略,促进AI面向经济的开发与应用,反过来,经济是进一步AI研究的推动力。
除欧洲外,日本也是发展AI的重要一极。2016年4月,日本设定了人工智能研发目标和产业化路线图,2018年8月,无人驾驶出租车驶上东京街头,2018年10月,丰田公司在无人驾驶和共享汽车等领域拓展业务。事实上,日本每年在培养AI科技和人才方面的预算是极高的,约为133亿日元。总而言之,日本推动人工智能技术给社会各领域带来巨大变革,尤其是给严重老龄化的日本社会打了一针“强心剂“。
人工智能发展如火如荼,与此同时,自主无人控制系统发展加速。进过几十年的发展,原来笨拙的机器人开始学会走路、跑步和抓取。这种进步开启了无人单体智能发育的新时代。细分来看,个体机器行为强调算法本身的研究,集群机器行为强调研究机器之间的相互作用,而混合人机行为则强调机器与人类之间的相互作用。总而言之,个体/集群机器人行为和混合人机行为的研究是人工智能研究的重要方面,这类研究有望突破智能系统的发展瓶颈。
尽管应用广泛,仍面临重大挑战
自主智能无人系统的应用模式随着智能水平的提高,呈现出分阶段螺旋式发展趋势。并且,其应用可以分军事和民用两大类。
在军事领域,自主智能无人系统的应用模式持续扩大。2001年,由卡内基梅隆大学研制的“蜘蛛”无人战车,具有良好的自主导航能力;2007年,由美国陆军坦克和汽车研究发展中心研制的“Crusher”无人战车,将“野外感知”技术整合到无人战车中,增强了无人车的自主机动性;2009年,英国“黑骑士”无人战车,也具备无人自主操作功能;2018年,俄罗斯最新研制的S500防空导弹系统能同时拦截10个目标,多个作战单元可与其他作战系统进行网络连接。此外,俄计划到2015年,无人系统在俄军装备结构中的比例将达到30%。
在民用领域,自主智能无人系统的应用更是丰富多彩。其中,智能交通的多无人车有人/无人协同控制就是一个例子。其实,协同控制可以提升无人车的自主性和安全性,是目前多无人车的重要控制模式。此外,自主智能无人系统也广泛应用于智能交通中的多无人车智能协同路径规划。多无人车智能协同路径规划可以提升智慧城市道路利用率,缓解城市拥堵。据预测,到2035年,全球无人车的销量将达1200万辆,协同将成为无人车的主要运行模式。
通常意义上,无人系统自主智能控制等级可以分为6个等级。分别是遥控驾驶、适应故障和环境变化、自主路径规划、多系统协调、多系统战术目标、分布式控制。
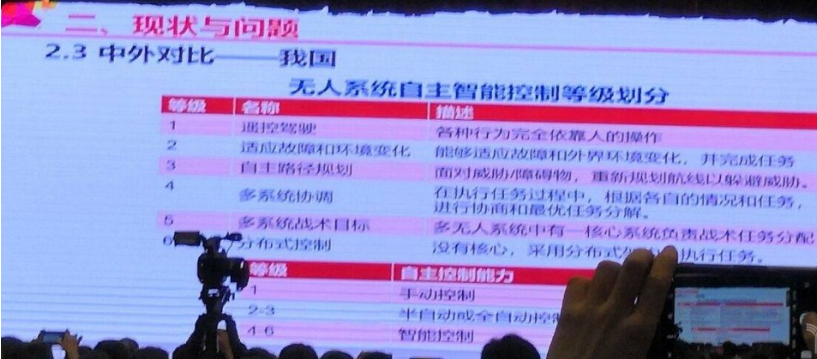
无人系统自主控制等级划分
然而,与国外相比,我国的无人系统是稍显落后的。
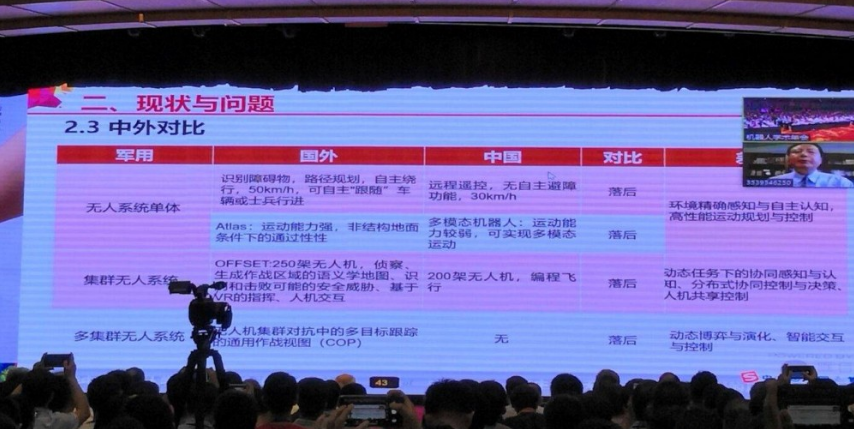
中外无人自动控制系统对比
并且,我国无人系统在适应复杂场景方面能力较弱。

中外无人控制系统对比
综合看来,现阶段,我国的自主智能无人系统研究面临不少挑战。这其中就包括,自主无人控制系统无法适应开放环境、无法适应突发事件、简单的动作仍会失效、无法适应多项任务等。
此外,现阶段的人工智能与仿生智能仍存在较大差距。就单体来看,人工智能难以在复杂环境下实现健壮和普适的机器智能,但仿生智能却能快速适应突变与对抗性的复杂环境,并做出正确的推理、决策和行动。就群体来看,机器智能在环境突变情况下,固定程序的协同难以实现,而仿生智能在复杂群体间已让有序。
总而言之,无人系统在指挥与决策、分布式控制、自主故障检测、人为干预等方面仍面临重大挑战。
困难并非无解,关键技术研究是重点
尽管无人系统发展面临重重考验,但解决问题依然有规律可循。事实上,只要“对症下药”,突破瓶颈并非不可能。
首先是协同指挥与决策问题。面临任务环境不确定、决策信息不完全、通信交互受限等问题,无人系统的协同指挥与决策的智能化程度低,导致协同任务不能有效完成。此时,只要将角色的概念引入多无人系统,仿照人类协作模式设计协同框架,就能克服复杂条件对无人系统协同任务的影响。具体需要解决的瓶颈问题包括模型构建、角色指派、协同决策和时序逻辑优化。解决相应问题的关键技术包括构建基于角色的无人系统协同决策模型,多无人系统角色分析与指派、基于角色的无人系统隐式协同决策、时许逻辑下约束下的无人系统协同规划。
其次,是分布式控制问题解决。无人系统分布式控制面临通信受限、时延长,不可直接预测等挑战,因鲁棒性差,导致理论适用范围有限。幸而,全面输出反馈分布式跟踪控制技术、基于Tensegrity结构的编队控制、基于系统相对输出的调节器、补偿器设计能够解决以上问题。
然后,是协同控制/攻击检测问题。事实上,多无人系统的故障检测的规模大,结构复杂,通信能力有限且面临的环境不确定,这些因素都增大了故障检测的难度。然而,只要解决单节点能力有限的问题,通过构建协同检测网络,就可借助节点之间的合作和群体优势赖完成对目标节点的检测任务。具体方法包括系统检测算法设计、残养生成器设计,并采用平均一致性协议分布式实现检测算法,提高检测算法的适用范围及可扩展性。
最后,是人与多机器人的共享控制问题。事实上,多机器人在高度受控的工业环境中可实现自主运行,但若要将其运用到真实环境中执行任务,遥操作仍然是主要的控制方式。其中,一个亟待解决的问题是,如何将人为干预控制与系统的自动化算法相结合。只有先解决这个问题,才能进一步利用人工智能辅助机器人系统来指导运动和规划,才能利用机器人自动化算法简化人的干预操作,降低人/机比例。而解决问题的关键,包括对人为干预意图的理解与建模、基于优化的控制技术实现,以及基于意图场的控制技术实现。

好的文章,需要您的鼓励
17

- 最新资讯
- 最新问答
-
2025两会热议:工业机器人“黄金五年”已来?
关键字: 工业机器人 2025-03-12 -
AI赋能工业机器人,制造业革命,已悄然来临!
关键字: 工业机器人 2025-01-16 -
巅峰对决完美收官!2024年中关村仿生机器人大赛各项冠军出炉!
关键字: 仿生机器人 2024-11-29 -
出海+ | 极智嘉10月全球新动态
关键字: 极智嘉 2024-10-24 -
会议邀请 | 昇视唯盛邀请您参加第8届国际机器人焊接、智能化与自动化会议暨第15届中国机器人焊接会议
关键字: 昇视唯盛 机器人焊接 会议 2024-10-17
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2019-12-10 15:56:01
- 2019-02-25 14:09:23
- 2018-11-01 08:55:18
- 2016-05-24 08:00:00
- 2021-05-20 13:31:10
- 2021-06-10 11:10:21
- 2022-11-14 16:16:05
- 2022-09-15 10:03:04
- 2022-09-02 12:17:08
- 2023-03-12 10:30:47
- 2022-11-21 15:57:36
- 2022-09-13 16:28:57
- 2025-03-12
- 2025-01-16
- 2024-11-29
- 2024-10-24
- 2024-10-17
- 2024-10-16
- 2024-10-16
- 2024-10-16
- 2024-10-15
- 2024-10-15









