





机器人可以拧油盖了? MIT开发的灵活机器人实在厉害

大自然神奇的力量,带给机器人专家很多研发灵感。
比如植物的生长。
当植物每天接受长时间的太阳光照时,通过细胞分裂(有丝分裂)和幼苗上胚轴或生长点的扩展,植物会迅速长出叶子和茎,这将支持未来花朵或果实的生长。
植物的生长方式给麻省理工学院的工程师带来了灵感,于是他们开发出一种灵活机器人。
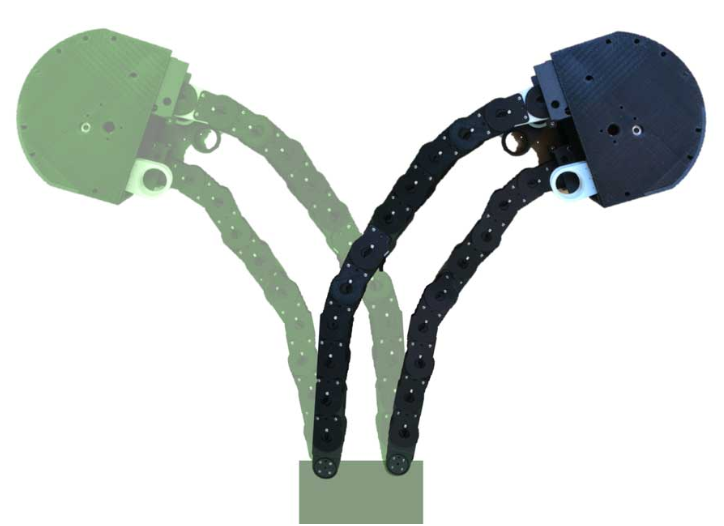
灵活机器人采用链状附件设计,使其延伸得足够灵活,因此能够在任何必要的配置中扭转和转动。
同时,它又具有足够的刚性以支撑重负载,或施加扭矩以在狭窄的空间中组装零件。
灵活机器人由一个“生长点”或变速箱组成,该变速箱将松动的互锁块链拉入盒子,将链条单元锁定在一起。
任务开始时,灵活机器人会以刚性附件的形式将链条逐个送出。
任务完成后,机器人可以收回附件,并以不同的长度和形状再次将其伸出以迎接下一个任务。
这项研究部分由日本轴承制造商NSK Ltd资助。
填补狭窄空间机器人灵活作业的空白
在相比宽阔开放的工厂中,移动机器人实现自主导航毫无困难,但是对于在狭小的空间里,或者是杂乱的货架后面,甚至是拧开汽车发动机的油盖,目前的机械手可能无法实现。
灵活机器人的研发也许就可以填补这方面的空白。
福特基金会工程学教授Asada表示,“机器人的实现与实际工厂完全不同,它是在某种抽象水平上展现出相同的功能。”
在实验中,机器人被编程后,它会绕着障碍物从其基座延伸或在扩展时转过身。
也就是说,它已经足够灵活了。
据研究人员表示,如果将抓爪连接到机器人的生长尖端或变速箱上,则灵活机器人可以生长得足够长,以在狭窄的空间中蜿蜒,然后施加足够的扭矩来松开螺栓或拧松盖子。
团队的研究员Emily Kamienski认为,自动维护是机器人可以完成的任务的一个很好的例子。她说:“引擎盖下的空间相对开阔,但最后一点是必须在发动机缸体周围导航或到达机油滤清器的地方,这是固定臂无法触及的地方。而这个机器人可以做类似的事情。”
关键是解决“最后一脚”
“最后一脚”是指机器人任务或探索性任务的最后一步。
机器人一般都花费大部分时间穿越开放空间,但其任务的最后一步可能涉及在更紧凑、更复杂的空间中,因此它需要进行更灵活的导航以完成任务。
目前,该团队已经设计出各种概念和原型来解决“最后一脚”的问题,包括由柔软的气球状材料制成的机器人,这种材料可以像藤蔓一样生长,毫无压力地通过狭窄的缝隙挤压。
但是,遗憾的是,一旦机器人蠕动到目的地,这种柔软的可扩展机器人还不够坚固,无法支撑执行器所需的末端执行器,例如抓手、相机和其他传感器。
福特基金会工程学教授Asada说:“我们的解决方案实际上不是软的,而是巧妙地使用刚性材料。”
研究人员设计了一个变速箱来代表机器人的“生长尖端”,就像植物的芽一样,随着更多的营养素流向该部位,尖端将产生更坚硬的茎。
在盒子中,它们装有齿轮和电动机系统,该系统用于拉起流化的材料,在这种情况下,弯曲的3D打印塑料单元序列相互连锁,类似于自行车链条。
当链条被送入盒子时,它绕绞盘转动,绞车通过第二组电机进行编程。第二组电动机被编程为将链条中的某些单元锁定到其相邻单元,再将其从盒子中送出时形成刚性附件。
研究人员通过对机器人进行编程,将某些单元锁定在一起,而其他单元则保持解锁状态,使其形成特定的形状,或在某些方向“生长”。
资料来源:麻省理工学院
当链条被锁定且状态是刚性的时候,其强度足以支撑1磅重(不到1斤)。
柔性制造或再添新成员
柔性制造作为一种具有旺盛需求和强大生命力的生产模式。
机器人在汽车和3C电子制造行业的应用占比超过65%,柔性抓取、灵活作业甚至能自主避障的机器人都是精密智能仓库亟需的设备。
在新一代的信息技术与制造业深度融合的发展主线下,如果将灵活机器人用于生产制造系统中,以其柔性化的生产能力,必将带来颠覆性的工厂革命。

好的文章,需要您的鼓励
20

- 最新资讯
- 最新问答
-
“机器人关节”被TA硬控了
关键字: 美的工业 rv减速机 2024-10-16 -
未来已至:Figure 02机器人引领AI硬件新时代
关键字: 人形机器人 2024-08-13 -
配天观点:具身智能商业化落地之路,道阻且长,但行则必至!
关键字: 配天 具身智能 2024-08-09 -
具身智能:人工智能新纪元,赋能未来科技新引擎
关键字: 具身智能 泰科机器人 2024-07-25 -
科技与艺术交融,BrainCo智能仿生手亮相北京中国国家博物馆丨设计智造与高质量发展特展
关键字: 强脑科技 智能仿生手 2024-07-22
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2024-08-09 15:55:07
- 2022-01-12 09:56:12
- 2019-12-20 17:31:37
- 2019-03-25 14:41:44
- 2019-07-05 13:37:10
- 2019-02-27 16:02:02
- 2024-10-16
- 2024-08-13
- 2024-08-09
- 2024-07-25
- 2024-07-22
- 2024-07-18
- 2024-07-18
- 2024-07-18
- 2024-01-29
- 2024-01-16









