





可灵活重构的磁微机器人群 仿自然生命系统
时间:2019-11-13
阅读:9108

近年来,微型机器人、纳米机器人在细胞和分子水平的诊断和治疗方面显示出巨大的潜力,然而,单个微型机器人能力有限,且难以集成驱动、传感等复杂功能。
哈尔滨工业大学提出一种利用外部交变磁场控制微型机器人集群的方法,能使微型机器人集群呈现出不同的形态,能在一定程度上模仿自然生命系统。
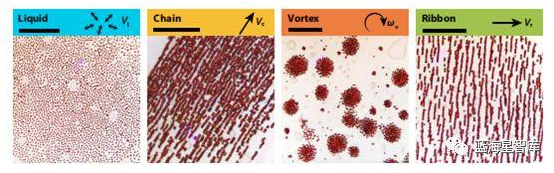
4种群集样式,从左到右依次为类似液体、链状、旋涡状和带状
研究人员利用交变磁场激发大量赤铁矿胶体颗粒构建微型机器人集群,其中胶体颗粒呈花生形,长轴3μm、短轴2μm。在外部不同磁场的驱动下,单个微型机器人呈现出振荡、滚动、翻滚和旋转的多种动态模式,进而形成类似液体、链状、旋涡状、带状4种集群样式。
研究人员使用离散粒子计算方法模拟了这种集群运动,并通过调整旋转磁场的频率及极化情况,快速转换集群样式。其中,链状群集可在狭窄环境中完成复杂运动;旋涡状群集可用于处理较大的负载;带状群集则能实现大面积的同步操作。
这种微型机器人集群可灵活重构,能满足不同的环境和任务要求,有望用于显像、靶向药输送等生物医学领域。
磁微机器人
机器人群
前沿科技

好的文章,需要您的鼓励
16

- 最新资讯
- 最新问答
-
“机器人关节”被TA硬控了
关键字: 美的工业 rv减速机 2024-10-16 -
未来已至:Figure 02机器人引领AI硬件新时代
关键字: 人形机器人 2024-08-13 -
配天观点:具身智能商业化落地之路,道阻且长,但行则必至!
关键字: 配天 具身智能 2024-08-09 -
具身智能:人工智能新纪元,赋能未来科技新引擎
关键字: 具身智能 泰科机器人 2024-07-25 -
科技与艺术交融,BrainCo智能仿生手亮相北京中国国家博物馆丨设计智造与高质量发展特展
关键字: 强脑科技 智能仿生手 2024-07-22
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2024-08-09 15:55:07
- 2022-01-12 09:56:12
- 2019-12-20 17:31:37
- 2019-03-25 14:41:44
- 2019-07-05 13:37:10
- 2019-02-27 16:02:02
栏目推荐
- 2024-10-16
- 2024-08-13
- 2024-08-09
- 2024-07-25
- 2024-07-22
- 2024-07-18
- 2024-07-18
- 2024-07-18
- 2024-01-29
- 2024-01-16









