





成精了!连波士顿机器狗不会的爬垂直梯技能它都Get了!

狗爬楼梯:No Problem
机器狗爬楼梯:No Problem

狗爬垂直梯:No No No
东京都立大学机器狗爬垂直梯:No Problem
让狗爬楼梯也许不是什么难事,让机器狗爬楼梯一样不是什么难事。
但是让狗爬垂直梯子就有一定难度。
而机器狗就不一样了。
对于仿生机器人来说,除了外形模仿极其相似之外,如果能将其性能也模仿的惟妙惟肖,那是一件了不起的事情。
但是,除了这些,机器人还可以做到超越原来的性能,有潜力学习生物本不具备的行为,不受生物学的约束。
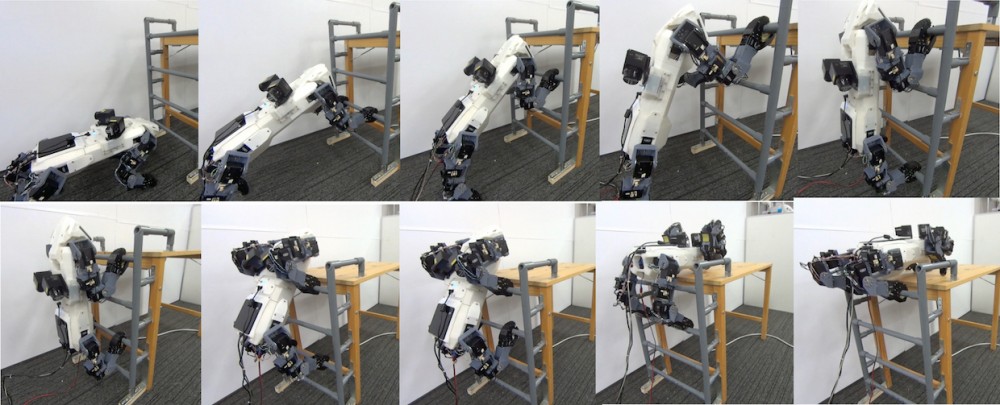
近日,来自东京都立大学的四足机器狗在IROS 2019上展示了自主攀爬垂直梯。以下是完整视频:
接下来小编分解几个镜头:
机器狗:老身先把前足放在垂直梯第一层,再往上第二层、第三层,后腿们跟上了~
后腿一蹦,整只狗就过来了!哈,我要开始表演了~
看我上梯,姿势一定要帅!动作快不快无所谓~
关键是最后一步,看我像不像你大学时上铺的兄弟!终于爬上来了!
垂直梯和倾斜梯对真正的狗狗猫猫有什么区别呢?
对于狗狗猫猫来说,有一定倾斜度的梯子没有难度,例如日常的爬坡和爬楼梯,它们都可以轻松的做到。
比如波士顿动力机器狗就可以实现自我导航与上下楼梯。

但是随着梯子的陡度增加到垂直方向,狗狗猫猫的质心越来越远离梯级,这就需要它们通过抓握辅助杠杆,而不是仅仅站立在梯级上来支撑自己增加的重量。对于没有强大抓握系统的动物来说,这是一个难点。
那么,这个四足机器狗是怎么爬上垂直梯的呢?
它具有23个自由度(DoF):每条腿5个自由度,双激光测距仪传感器2个自由度,头部1个自由度。
为了让它具有强大的抓握能力,东京都立大学的机器人专家在它的腿上将其拇指设置为相反方向,即将其脚变成抓爪。
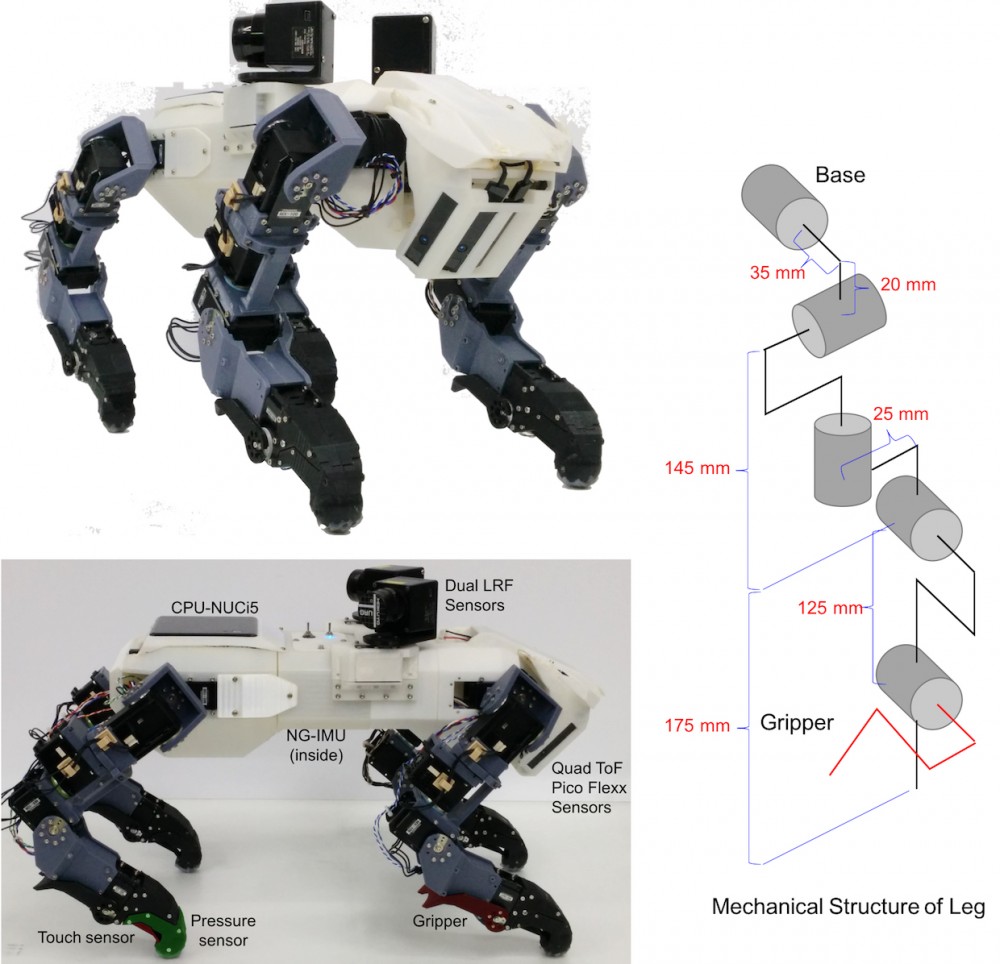
在后腿抓住上面的梯层后,四足机器狗将自身推到平台。这样它能够使用抓爪完全自主地爬上无扶手的垂直梯子。
另外,这个四足机器狗配备了惯性测量单元(IMU)、飞行3D相机,以及每个“狗爪”上都配置了触摸力矩传感器。
其主控系统是由英特尔NUC计算机操纵,而Arduino被用作辅助控制器来管理内部传感器(力,触摸和IMU)的输入输出信号。
研究人员表示,狗子的成功并不是一蹴而就的,而是在五次的在特定的垂直梯上训练后,它才准确无误地实现自主攀爬垂直梯。
这种故障是因为它缺少扭矩执行器,而不是整体方法造成的。
因此,研究人员的下个目标是如何让它无需训练即可爬上新的阶梯。

好的文章,需要您的鼓励
13

- 最新资讯
- 最新问答
-
未来已至:Figure 02机器人引领AI硬件新时代
关键字: 人形机器人 2024-08-13 -
配天观点:具身智能商业化落地之路,道阻且长,但行则必至!
关键字: 配天 具身智能 2024-08-09 -
具身智能:人工智能新纪元,赋能未来科技新引擎
关键字: 具身智能 泰科机器人 2024-07-25 -
科技与艺术交融,BrainCo智能仿生手亮相北京中国国家博物馆丨设计智造与高质量发展特展
关键字: 强脑科技 智能仿生手 2024-07-22 -
保障六维力传感器在医疗机器人使用中的数据安全和隐私保护
关键字: 六维力传感器 鑫精诚 2024-07-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2024-08-09 15:55:07
- 2022-01-12 09:56:12
- 2019-12-20 17:31:37
- 2019-03-25 14:41:44
- 2019-07-05 13:37:10
- 2019-02-27 16:02:02
- 2024-08-13
- 2024-08-09
- 2024-07-25
- 2024-07-22
- 2024-07-18
- 2024-07-18
- 2024-07-18
- 2024-01-29
- 2024-01-16
- 2024-01-10









