





双足机器人Cassie Cal学会变戏法
时间:2019-11-19
阅读:8878
原创

并没有特别的原因,为什么会变戏法对于机器人来说是有用的技能。尽管如此,仍经常教会机器人如何处理事物。盲人机器人可以玩耍,人形机器人可以玩耍,甚至无人机都可以玩耍。为什么?因为杂耍很难,老兄!您必须立即考虑一堆不同的事情,也要立即做一堆不同的事情,这个特定的人至少会觉得压力太大。尽管玩杂耍可能不会使机器人感到压力,但它确实需要仔细协调的感测,计算和驱动,这意味着与测试系统功能一样,它与任何一项任务(以及比大多数任务更具娱乐性的任务)一样好。
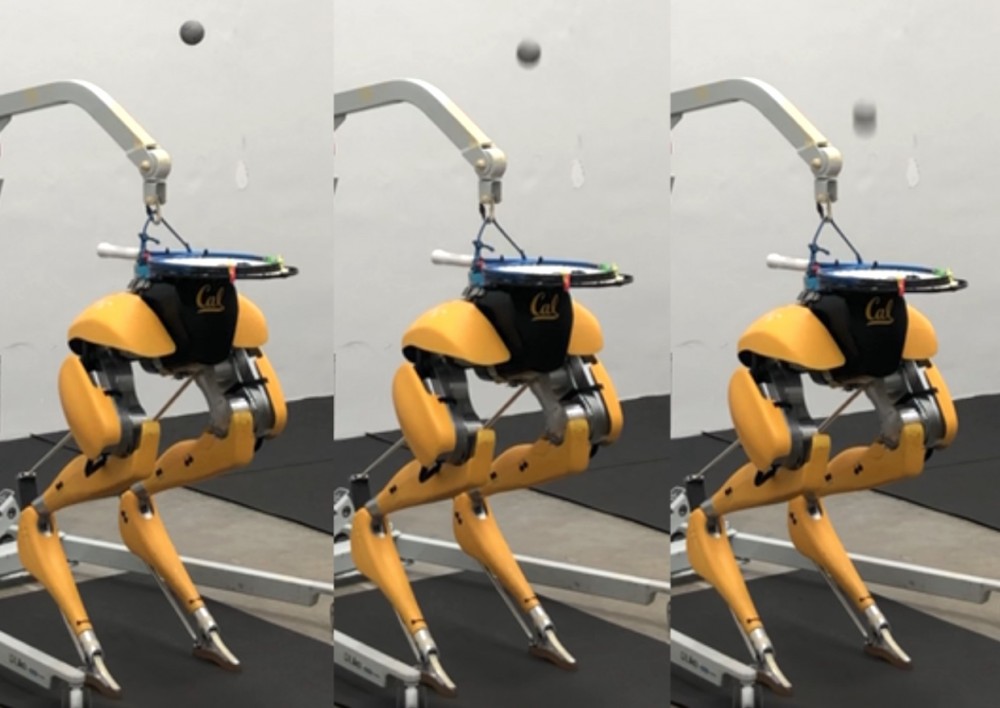
加州大学伯克利分校的Cassie Cal机器人由两条腿组成,如果您感到慈善,可以称其为躯干。她刚刚学会了通过将球弹跳到她的头(如果她有一根的话)上来变戏法。这个想法是,如果Cassie可以同时兼顾平衡,那么她也将能够做其他需要动态多任务处理的事情。如果那还不成功,她仍然可以加入马戏团。

Cassie的杂耍由外部运动捕捉系统辅助,该系统跟踪球的位置,但除此之外,一切都是自主的。Cassie能够通过前后倾斜,左右倾斜以及上下移动来操纵球。她在保持自己平衡的同时做到了这一点,这是本研究的重点–成功执行了两种动态行为,有时这些行为可能彼此矛盾。这里的最终目标不是制造一个更好的杂耍机器人,而是探索动态多任务处理,这是机器人在人类环境中取得成功所必需的技能。
这项工作由Koushil Sreenath领导的加州大学伯克利分校的混合机器人实验室完成,由Katherine Poggensee,Albert Li,Daniel Sotsaikich,Bike Zhang和Prasanth Kotaru完成。
双足机器人
前沿科技

好的文章,需要您的鼓励
7

- 最新资讯
- 最新问答
-
“机器人关节”被TA硬控了
关键字: 美的工业 rv减速机 2024-10-16 -
未来已至:Figure 02机器人引领AI硬件新时代
关键字: 人形机器人 2024-08-13 -
配天观点:具身智能商业化落地之路,道阻且长,但行则必至!
关键字: 配天 具身智能 2024-08-09 -
具身智能:人工智能新纪元,赋能未来科技新引擎
关键字: 具身智能 泰科机器人 2024-07-25 -
科技与艺术交融,BrainCo智能仿生手亮相北京中国国家博物馆丨设计智造与高质量发展特展
关键字: 强脑科技 智能仿生手 2024-07-22
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2024-08-09 15:55:07
- 2022-01-12 09:56:12
- 2019-12-20 17:31:37
- 2019-03-25 14:41:44
- 2019-07-05 13:37:10
- 2019-02-27 16:02:02
栏目推荐
- 2024-10-16
- 2024-08-13
- 2024-08-09
- 2024-07-25
- 2024-07-22
- 2024-07-18
- 2024-07-18
- 2024-07-18
- 2024-01-29
- 2024-01-16









