





效率提高了24%,布里斯托大学发明手持式机器人将应用于远程操作应用

自英国布里斯托大学的两名研究人员开发了一种新型机器人操作过程,其中涉及到的机械臂将可以远程协助执行一些基础维修的任务。
Bristol大学的两名研究人员的这个实验仍处于初期阶段,这是一个手持式机械臂,在未来也许可以解决涉及远程指令的一些艰巨的维护,使人类用于指导另一方来进行一些基础的诊断任务或是培训任务。
研究人员在上个月发表的一篇新论文中报告说,部分自主的机器人将任务效率提高了24%。这项技术未来还可以帮助外科医生教新手医生如何进行实操手术。
要了解此机器人的工作原理,至关重要的是要了解研究作者Janis Stolzenwald和Walterio W. Mayol-Cuevas他们希望此机器人能解决些什么问题。在使用协作式远程协助的情况下,当遇到一个学习或经验不足的工作人员在特殊紧急情况下要如何能解决那些棘手且需要又经验的人才能解决的问题呢?例如,要在医学手术中培训年轻的医生,经验丰富的医生可能会在描述如何操作工具的同时进行远程培训新手。
研究者说,远程协助在工业应用中特别有用,例如在现代化的复杂工厂中。诊断或解决问题一般是需要高水平的专业知识,或可能需要邀请昂贵的技术专家到达现场解决问题,例如制造过程中的机器脱机或管道阻塞。尽管增强现实系统和远程操纵过程已经在慢慢使用中,但似乎大家还是缺乏一些更有效的方法。目前而言,随着通信的便捷,的确增加了一部分远程工作的不稳定性,但是在远程工作者和本地工作者之间解决问题仍然存在困难。
为了弥合这一差距,Stolzenwald和Mayol-Cuevas提出了一种使用半自动手持机械臂的系统,并在部分模拟的管道维护任务中对其进行了测试。
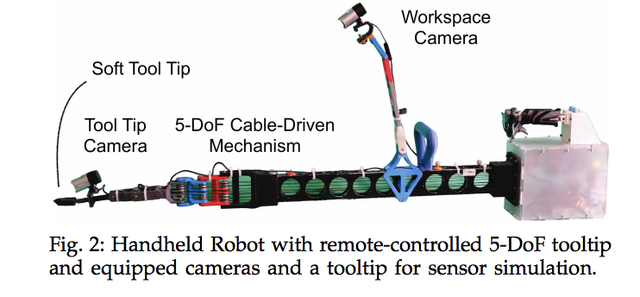
测试的工作场景:在工作现场,由本地用户控制一个配备有摄像头和五个自由度(意味着手臂可以在五个不同平面中移动)的手持式机器人。然后,远程用户通过自定义界面访问其他工人正在使用的机械手。它使他们可以控制和操纵机器人,而工作现场的另一个人则握住手臂。
Stolzenwald和Mayol-Cuevas最感兴趣的是观察研究中的三个主要方面(远程工人,本地工人和机器人手臂)如何协作。Stolzenwald和Mayol-Cuevas写道:“在任务执行方面,我们发现手持式机器人的自主性和任务知识有助于缩短协作时间,从而提高了协作效率。”
他们发现,由远程控制但由本地用户握住的机械臂使测试任务的效率提高了24%,如果您是企业主并且您的公司规模庞大,那么这将大大提高。
就通信这一主要目标而言,科学家发现,至少从定性上来说,远程控制机器人手臂的能力使完成任务变得更加容易。一般在实际应用过程中,工人需要完成各类维护工作的时候涉及到的互相口头交流比较少。研究人员推断这是因为机器人的瞄准功能取代了远程用户的小尺寸运动指令,并且还减少了移动所需的任务知识。
在上个月发表的第二篇论文中,二人组调查了人们如何响应可以完成任务但实际上会做自己的事情的机械臂。未来人类与这种手持式机械臂的相处会是在什么场景何状态下呢?当用户的操作与机械臂的实现不符时,用户会不会感到非常慌张。
将来,Stolzenwald和Mayol-Cueva希望超越他们测试机器人手臂的模拟,并过渡到实际环境中。他们还想研究经过全面培训的远程工作者如何从这种机器人协助中受益,以及在培训方案中如何使本地用户受益。

好的文章,需要您的鼓励
15

- 最新资讯
- 最新问答
-
未来已至:Figure 02机器人引领AI硬件新时代
关键字: 人形机器人 2024-08-13 -
配天观点:具身智能商业化落地之路,道阻且长,但行则必至!
关键字: 配天 具身智能 2024-08-09 -
具身智能:人工智能新纪元,赋能未来科技新引擎
关键字: 具身智能 泰科机器人 2024-07-25 -
科技与艺术交融,BrainCo智能仿生手亮相北京中国国家博物馆丨设计智造与高质量发展特展
关键字: 强脑科技 智能仿生手 2024-07-22 -
保障六维力传感器在医疗机器人使用中的数据安全和隐私保护
关键字: 六维力传感器 鑫精诚 2024-07-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2024-08-09 15:55:07
- 2022-01-12 09:56:12
- 2019-12-20 17:31:37
- 2019-03-25 14:41:44
- 2019-07-05 13:37:10
- 2019-02-27 16:02:02
- 2024-03-24 11:04:05
- 2022-10-31 11:29:12
- 2022-08-25 11:11:08
- 2023-08-16 13:15:03
- 2024-08-13
- 2024-08-09
- 2024-07-25
- 2024-07-22
- 2024-07-18
- 2024-07-18
- 2024-07-18
- 2024-01-29
- 2024-01-16
- 2024-01-10









