





【ABB】如何使用WorldZone功能创建HOME位信号输出
时间:2019-11-20
阅读:82445

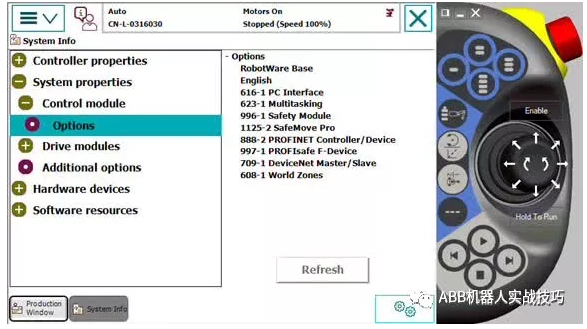
1)ABB机器人需要有608-1 World zones功能
2)创建routine,例如power_on,进行相关设置
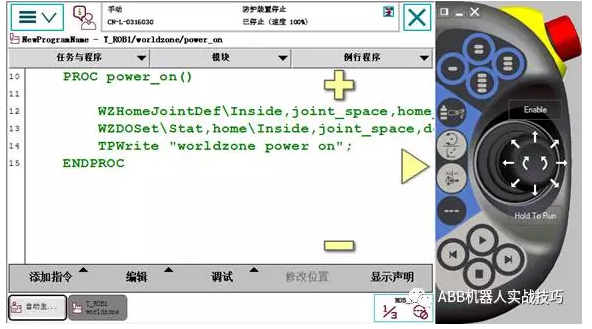
3)插入定义worldzoneHome位指令WZHomeJointDef,如下
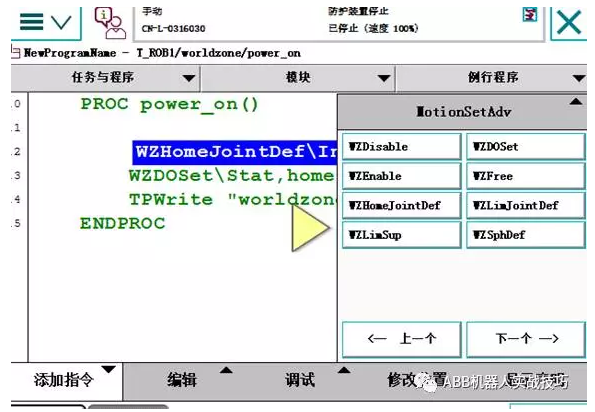
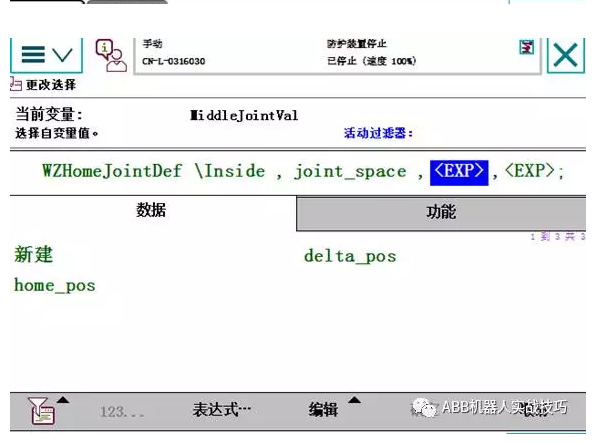
其中\Inside表示监控机器人各轴在这个范围内,joint_space为shapedata,即机器人会把后续home点和误差构成的范围存入该数据。上图光标位置为HOME位,数据类型为JointTarget,光标后的参数为每个轴的允许误差,例如2,2,2,2,2,2表示各轴允许基于Home位各轴正负2度的误差
4)插入WZDOSET指令,设置对应DO输出
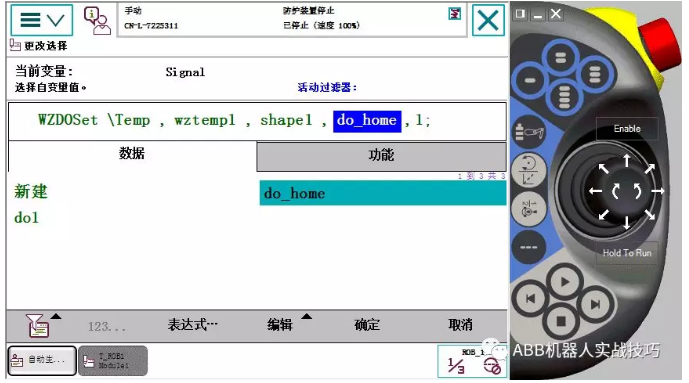
其中do_home为设置的对应输出信号,1表示需要输出的信号值为1,如果机器人在Home区间内,输出1,否则输出0
5)进入控制面板-配置-signal,把do_home的AccessLevel设为readonly(只读)

6)以上的设置语句,仅需在开机时自动运行一次即可。进入控制面板-配置-controller主题下,设置eventroutine:
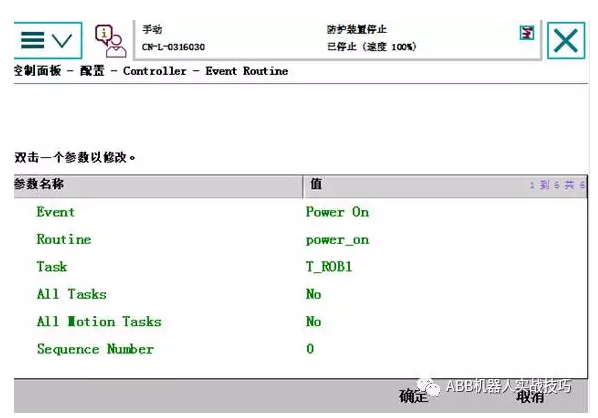
其中Power On为开机事件,Routine的power_on为设置worldzone的程序
7)重启机器人。
8)此时,如果机器人在Home位,do_home输出为1,否则为0

ABB
ABB机器人
技术干货

好的文章,需要您的鼓励
27

- 最新资讯
- 最新问答
-
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25 -
机器人打磨抛光设备有哪些?特点是什么?
关键字: 机器人打磨 抛光 特点 2024-06-20
-
工业机器人技术是干什么的?
标签: 工业机器人,技术 提问:小杰 2024-07-03 13:03:15 -
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05

推荐
上海ABB工程有限公司
 5年
5年



相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-10-24 21:02:58
- 2022-10-14 17:56:03
- 2022-10-23 14:38:05
- 2024-04-11 20:51:04
- 2022-10-24 19:54:03
- 2022-08-03 10:20:40
栏目推荐
- 2024-07-03
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06









