





万万没想到 跟着映射也可远程遥控机械手

据外媒报道,哥伦比亚大学ROAM实验室公布了他们的最新研究成果——远程遥控非拟人化机器人手。
在复杂的环境中,远程遥控操作可以通过远程操控,实现跨越空间的操作,免除人员培训的繁琐程序,可以说,是一种十分具有效率性的方式,尤其在医疗手术的环境中。
实验过程中,为了验证算法映射和经验映射都投影到与远程操作相关的子空间,研究人员要求九个新手用户完成操作任务使用我们的映射和两个最新的映射作为基准,四个新手进行了拾取和放置用Schunk SDH手进行实验。
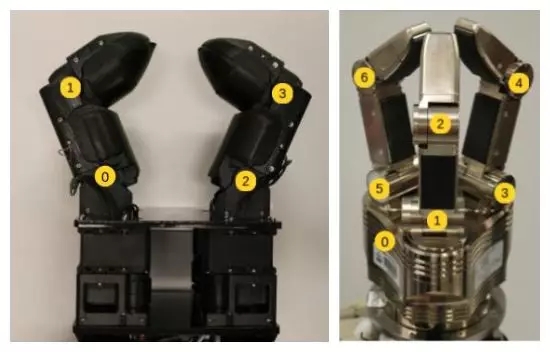
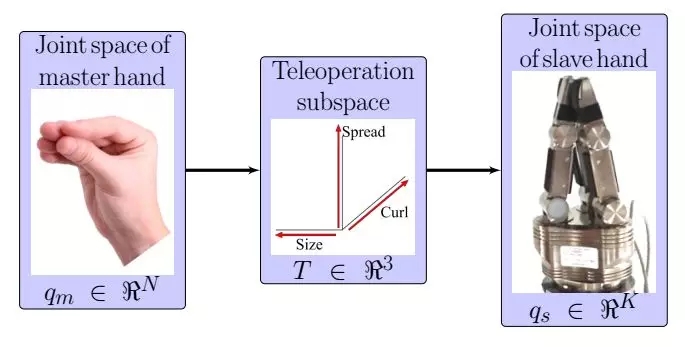
来自ROAM的研究人员表示:“我们力求在人的手和完全联动但非拟人化的机器人手之间创建一个映射,该映射足够直观,甚至对于新手用户也可以实现有效的实时远程操作。我们提出的方法是使用与远程操作相关的子空间作为两只不同手的姿势空间之间的中介。通过将主手的姿势投影到与从手共享的已定义远程操作子空间中,然后从远距操作子空间投影到从手的姿势空间中,来实现远程操作。”
在非拟人化机器人手中,研究人员证明了该过程可以凭经验完成:按照这种表述,创建远程操作映射的人定义了“打开”,“卷曲”和“伸展”运动对于特定机器人手的意义。这样,由于手运动对于不同的手意味着不同的事物,因此映射与手运动学相关联。我们可以证明,可以通过一系列简单的步骤(第四节)创建经验映射,并为新手带来有效的远程操作。
研究人员说:“适用于拾放和手动操作实验中,被呈现给对象相同的顺序,并在一个控件之前完成对象转到另一个控件。我们将顺序随机化受试者使用了哪些控件。我们也没有告诉每种控制方法的工作原理,只给出了他们两分钟用手玩并介绍了一种新的控制方法。”
另外研究人员要求五位新手用户使用两指抓爪执行手动操作任务。精确抓握时,将一个物体放在手指远端链接之间的桌子上。然后要求对象通过将对象移近手掌并用机器人手指将其包裹起来,从而将对象转变为抓地力。为了使转换被认为是成功的,受试者必须移动一个物体,使其与一个手指上的近端和远端链节以及另一根手指上的至少一个链节接触。
实验结果表明,远程操作子空间适用于低维控制,例如肌电图(EMG),并且还希望通过更多的运动学配置来验证该控制。
最后研究人员表示,这项工作的未来可能会朝着许多方向发展。研究人员将继续证明该子空间与其他具有不同运动学配置的手相关,并证明子空间对于更复杂的任务(如组装和拆卸机器)很有用。

好的文章,需要您的鼓励
19

- 最新资讯
- 最新问答
-
“机器人关节”被TA硬控了
关键字: 美的工业 rv减速机 2024-10-16 -
未来已至:Figure 02机器人引领AI硬件新时代
关键字: 人形机器人 2024-08-13 -
配天观点:具身智能商业化落地之路,道阻且长,但行则必至!
关键字: 配天 具身智能 2024-08-09 -
具身智能:人工智能新纪元,赋能未来科技新引擎
关键字: 具身智能 泰科机器人 2024-07-25 -
科技与艺术交融,BrainCo智能仿生手亮相北京中国国家博物馆丨设计智造与高质量发展特展
关键字: 强脑科技 智能仿生手 2024-07-22
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2024-08-09 15:55:07
- 2022-01-12 09:56:12
- 2019-12-20 17:31:37
- 2019-03-25 14:41:44
- 2019-07-05 13:37:10
- 2019-02-27 16:02:02
- 2023-05-22 14:07:23
- 2023-05-22 14:15:44
- 2023-01-11 14:15:15
- 2023-01-27 15:18:18
- 2018-09-12 17:15:57
- 2018-12-24 12:45:04
- 2024-10-16
- 2024-08-13
- 2024-08-09
- 2024-07-25
- 2024-07-22
- 2024-07-18
- 2024-07-18
- 2024-07-18
- 2024-01-29
- 2024-01-16









