





东京工业大学发布用于机器人辅助手术的新控制器设计

随着自动化和机器人技术的发展,医疗机器人已经开始渗入医疗保健领域,通过机器人的辅助,外科医生的操纵下,机器人手术在过去十年中取得了长足的进步。
这样的系统通过滤除手部震颤并将其手部动作缩放为较小的动作,从而提高了外科医生的灵活性和准确性。它们还降低了常见手术并发症(如手术部位感染)的风险。
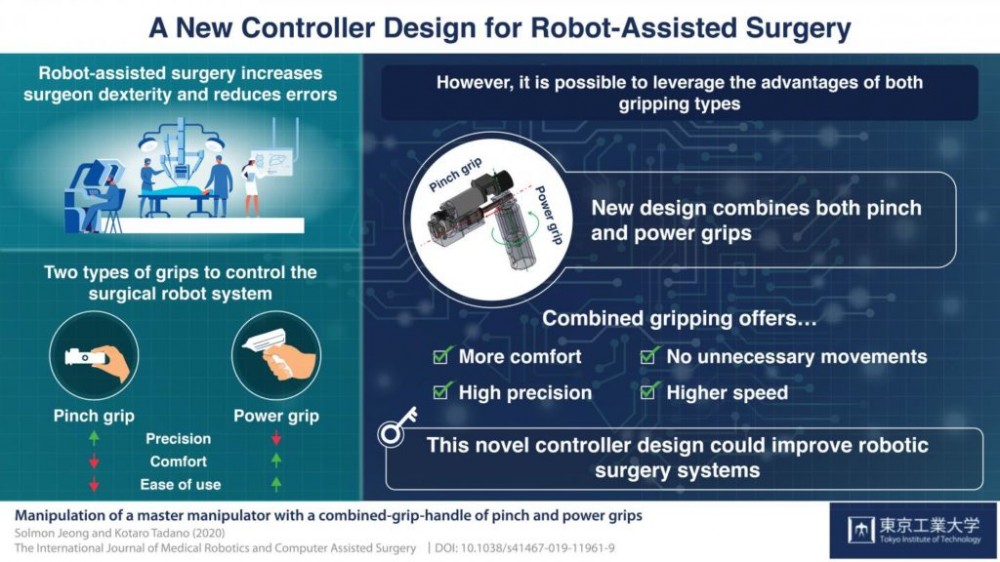
近日,东京工业大学的科学家宣布了一种新型的机器人辅助手术机械控制器。新控制器结合了商用机器人中使用的两种夹持方式,以利用每种夹持器的最佳功能并为外科医生提供更高的精度。
克服人类掌握的局限性
然而,机器人辅助手术有其自身的缺点,特别是对于进行手术的人。机器人外科医生有时会在手术过程中感到身体不适,手指疲劳很常见。这种不适与他们握住主控制器的方式有关。
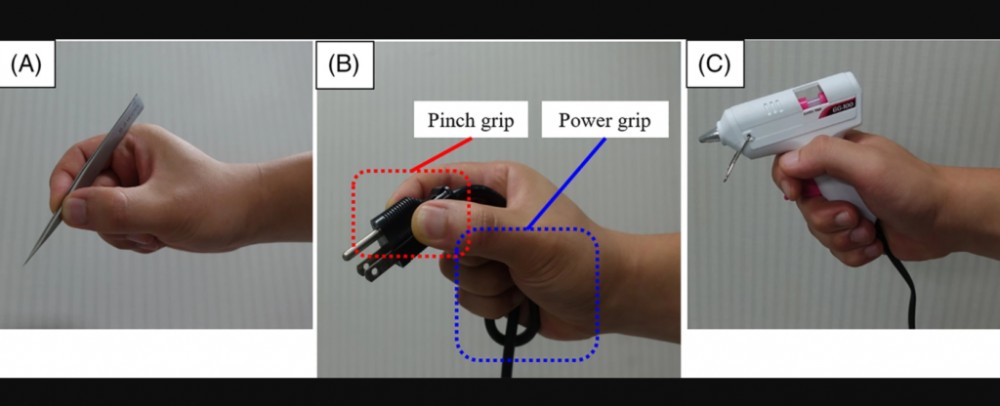
通常使用两种类型的手柄来控制外科手术机器人:“捏手”和“电动手”。捏紧手柄已在常规手术中使用了多个世纪。它涉及使用拇指、中指和食指来实现高精度运动。另一方面,电动手柄包括用整只手抓住手柄,更适合于有力的工作和较大的运动。
由于捏握会在手和手指的某些肌肉上施加压力,因此更容易引起疲劳。而且,尽管电动握柄似乎并未引起这种不适,但它的控制精度较差。因此,在由捏握引起的不适和对动力握持的精细控制的缺乏之间存在折衷。
幸运的是,东京工业大学(Tokyo Tech)的两位研究人员Solmon Jeong和Kotaro Tadano 找到了解决此问题的灵巧方法。在《国际医疗机器人与计算机辅助外科杂志》上发表的一项研究中,他们推测可以设计出一种结合了两种抓握方式的主控制器。
Tadano博士说:“在机器人手术中,两种常规夹持方法的局限性与每种夹持类型的优缺点密切相关。” “因此,我们想研究一种结合的抓持方法是否可以改善机器人手术期间的操纵性能,因为这可以利用两种抓持类型的优点同时弥补它们的缺点。”
提高手术精度和准确性
经过概念验证实验并取得了可喜的结果之后,研究人员设计了一个带有模块化主控制器的机器人手术系统,该系统可以进行调整,以采用捏合、电动或组合抓紧方式。
该系统通过定点实验进行了测试,其中有15名参与者必须控制机械臂,以在最短时间内将针尖带入目标孔而不会碰到障碍物。针对每种握持类型测试了各种条件,例如使用手臂和掌托,使用手柄,握持类型以及捏握动作。
研究结果表明,组合的抓地力在指向性实验的各个方面产生了更好的性能,包括失败的次数(触摸障碍物),所需的时间以及为达到目标而进行的动作的总长度。许多参与者还报告称,由于使用这种方法的简便性和舒适性,它比其他两种方法更喜欢组合夹持方法。
这种新的主控制器设计可能是机器人辅助手术朝正确方向迈出的一步。
“机器人手术主控制器的操纵方法在直观性,舒适性,精确性和稳定性方面具有重要影响。除了实现精确的操作外,舒适的操作方法还可能使患者和外科医生受益。”
尽管需要进一步的工作来分析与机器人手臂操作有关的其他变量,但这项工作可能会使先进的外科手术机器人系统受益。

好的文章,需要您的鼓励
17

- 最新资讯
- 最新问答
-
兼顾极小码与大景深,超耐用手持读码器IDH9000全新上市
关键字: 海康 读码器 新品 2024-09-19 -
FTP 系列仿人五指灵巧手震撼来袭!
关键字: 因时机器人 灵巧手 新品 2024-09-13 -
超级SUNLINE已就位!一款不容错过的阪东轻型好带
关键字: 阪东 同步带 2024-09-12 -
迅捷力控,突破并联,自适应并联机器人 Moonlight 玄晖批量开售
关键字: 非夕 并联机器人 2024-09-05 -
迅捷力控,突破并联,自适应并联机器人 Moonlight 玄晖批量开售
关键字: 非夕 并联机器人 2024-09-05
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2021-01-05 15:49:07
- 2022-06-09 17:46:18
- 2021-03-09 11:18:10
- 2019-12-19 17:58:28
- 2021-02-05 13:07:47
- 2021-03-05 18:02:45
- 2023-02-05 09:53:14
- 2022-10-12 22:18:21
- 2022-11-02 21:03:52
- 2022-10-24 15:59:00
- 2022-11-09 22:04:59
- 2022-10-11 17:40:17
- 2024-09-19
- 2024-09-13
- 2024-09-12
- 2024-09-05
- 2024-09-05
- 2024-09-04
- 2024-08-27
- 2024-07-09
- 2024-08-27
- 2024-08-27









