





BADGR移动机器人学会自主导航

移动机器人AGV导航和避障的几何算法足以应对仓库等环境,但对于户外的动态变化可能还不够。加州大学伯克利分校的研究人员说,他们已经开发出了BADGR,“一种端到端,基于学习的移动机器人导航系统,可以使用在现实环境中收集其自己监测的非策略性数据进行训练,无需任何模拟或人工监督。”

野外机器人必须能够在高高的草地上,在崎岖不平的地面上,或在没有室内设施或道路典型车道的地方找到自己的路。常规方法是使用计算机视觉和基于语义标记的训练模型。
加州大学伯克利分校研究员格雷戈里·卡恩在博客中写道:“大多数移动机器人纯粹是从几何学的角度思考问题;它们能探测障碍物的位置,并围绕这些感知到的障碍物规划路径,以达到目标。”“这种纯粹的几何世界观不足以解决许多导航问题。”
该研究的作者卡恩(Kahn),彼得阿比尔(Pieter Abbeel)和谢尔盖·莱文(Sergey Levine)表示,机器人可以“使用原始的视觉感知,在没有人工提供标签或几何地图的情况下”自主学习环境中的特征。他们探索了机器人如何利用其经验来开发预测模型。
伯克利AI研究实验室(BAIR)的团队开发了伯克利自动驾驶地面机器人(BADGR),以从现实环境中收集数据并从根本上训练自己如何避免障碍。它基于Clearpath Jackal移动机器人,包括六自由度惯性测量单元传感器,GPS,2D激光雷达传感器和NVIDIA Jetson TX2处理器。
伯克利研究人员决定不使用最近收集的数据来重新编写规则,也不使用传统的数据收集,而是决定使用规则外的算法,该算法可以使用任何控制方式收集的数据来训练系统。BADGR还使用了时间相关的随机行走控制策略,这样机器人就不会只是直线行驶。

BADGR核心的神经网络预测模型
卡恩说,BADGR自主收集和标记数据,训练了基于图像的预测神经网络模型,并使用该模型根据经验来计划和执行路径。
研究人员在伯克利里士满野外站环境试验场测试了BADGR 。BAIR小组说,BADGR只需自主收集42小时的数据,其性能优于同步定位和映射(SLAM)方法。与其他导航方法相比,它使用的数据更少。
BADGR成功地实现了目标,同时避免了碰撞和崎岖不平的地形
研究人员说:“我们在真实的户外环境中进行了评估,包括城市和越野地形。”BADGR自主收集了34小时的城市地形数据和8小时的越野地形数据。虽然收集的数据量似乎很大,但总的数据集由72万个非策略数据点组成,比计算机视觉中当前使用的数据集要小,比深度强化学习算法通常使用的样本数要小得多。
例如,基于SLAM加上规划器的系统无法避免不平的草地,而BADGR学会了走正确的道路。BAIR的实验还发现BADGR的性能随着时间的推移而提高,因为它选择了更直接的目标路线。该系统还能够将其经验教训推广到新环境中。
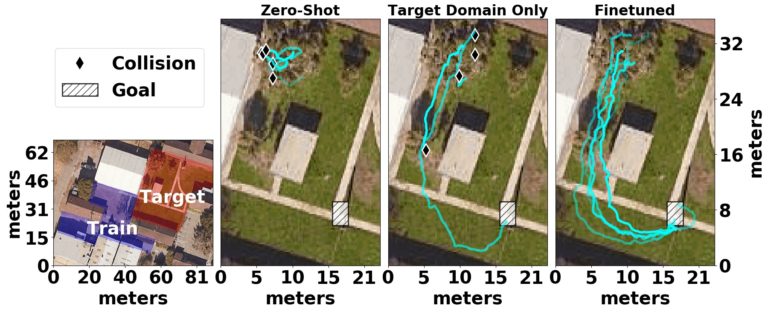
随着BADGR收集更多数据,其路径规划得到了改善
BADGR背后的关键见解是,通过直接从现实世界中的经验中自主学习,BADGR可以了解导航能力,随着收集更多数据而不断完善,并推广到看不见的环境中。
研究人员承认,移动机器人仍然需要人工帮助,例如当它翻转时,但他们指出BADGR需要的数据少于其他方法。在远程围绕移动的物体和人员进行测试以及收集更多数据方面,还有更多工作要做。
该团队认为解决这些挑战和其他挑战对于使机器人学习算法能够在现实世界中学习和行动至关重要,而BADGR是朝着这一目标迈出的有希望的一步。

好的文章,需要您的鼓励
11

- 最新资讯
- 最新问答
-
“机器人关节”被TA硬控了
关键字: 美的工业 rv减速机 2024-10-16 -
未来已至:Figure 02机器人引领AI硬件新时代
关键字: 人形机器人 2024-08-13 -
配天观点:具身智能商业化落地之路,道阻且长,但行则必至!
关键字: 配天 具身智能 2024-08-09 -
具身智能:人工智能新纪元,赋能未来科技新引擎
关键字: 具身智能 泰科机器人 2024-07-25 -
科技与艺术交融,BrainCo智能仿生手亮相北京中国国家博物馆丨设计智造与高质量发展特展
关键字: 强脑科技 智能仿生手 2024-07-22
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2017-10-30 05:29:57
- 2017-11-06 03:31:40
- 2017-09-13 08:48:32
- 2021-05-20 13:46:38
- 2017-09-07 07:15:47
- 2020-09-28 09:21:35
- 2023-01-05 09:44:52
- 2023-03-10 09:19:20
- 2022-09-21 15:50:03
- 2022-08-10 09:18:03
- 2022-08-02 07:45:51
- 2021-08-03 13:40:22
- 2024-10-16
- 2024-08-13
- 2024-08-09
- 2024-07-25
- 2024-07-22
- 2024-07-18
- 2024-07-18
- 2024-07-18
- 2024-01-29
- 2024-01-16









