





【ABB】ABB 机器人电机(加载配置文件) 确定齿轮装置的尺寸

配置文件简介:
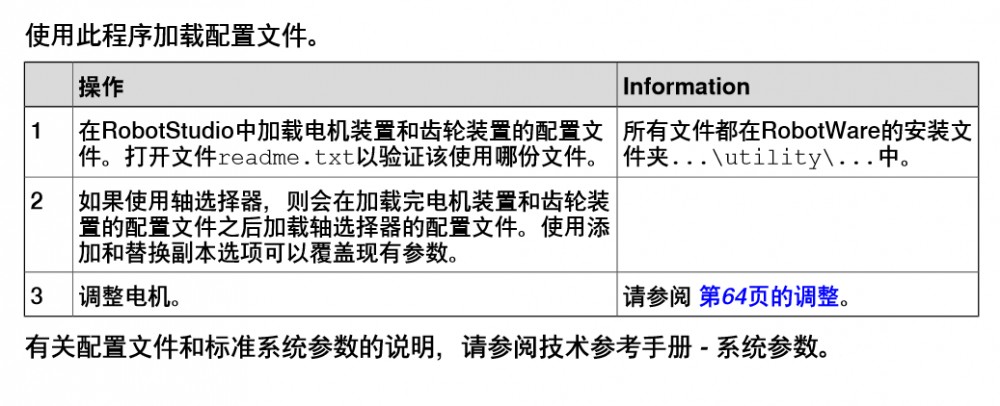
模板配置文件随电机装置和齿轮装置一并交付。可以在投入生产之前对电机装置和齿 轮装置的配置进行调整以优化性能。
模板文件位于RobotWare的以下安装目录中:
• ...\RobotPackages\RobotWare_RPK_
• ...\RobotPackages\RobotWare_RPK_
限制:模板文件中使用的加速值和减速值可能需要进行验证。 对于MID齿轮装置,必须仔细测试并重新定义(如果需要)工作范围。如果定义的值错误,则会有MID撞到终点止动装置的风险。
电机装置的加速转矩限制
在默认情况下会降低电机装置的加速转矩限制以保护连接的设备。电机装置的加速转 矩限制也可提升,请参阅产品规格-电机装置和齿轮装置。重新定义StressDutyCycle类型中的TorqueAbsoluteMax(主题Motion),可提 升电机装置的加速转矩限制。
文件名称约定
配置文件使用的命名约定基于以下数据:
• 配置主题
• 装置类型
• 驱动装置和驱动模块(系统参数DriveUnit和DriveModule)
• 测量链接、电路板位置和测量模式(系统参数MeasurementLink、Board Position和MeasurementNode)
例如,MOC_MU100_M7DM1_L1B1N7.cfg 定义了:
• 主题Motion
• 电机装置MU100
• 驱动装置7和驱动模块1
• 测量链接1、电路板位置1和测量模式7
确定齿轮装置的尺寸
加速值和减速值:要保护齿轮装置不会运转过猛以及损坏齿轮箱,必须计算臂侧轴的加速值和减速值。此计算会得出系统参数NominalAcceleration和NominalDeceleration的最大值。如果加速过快,可以降低该数值,请参阅应用手册-Additionalaxesandstandalone controller。使用的加速值不得超过推荐的最大。
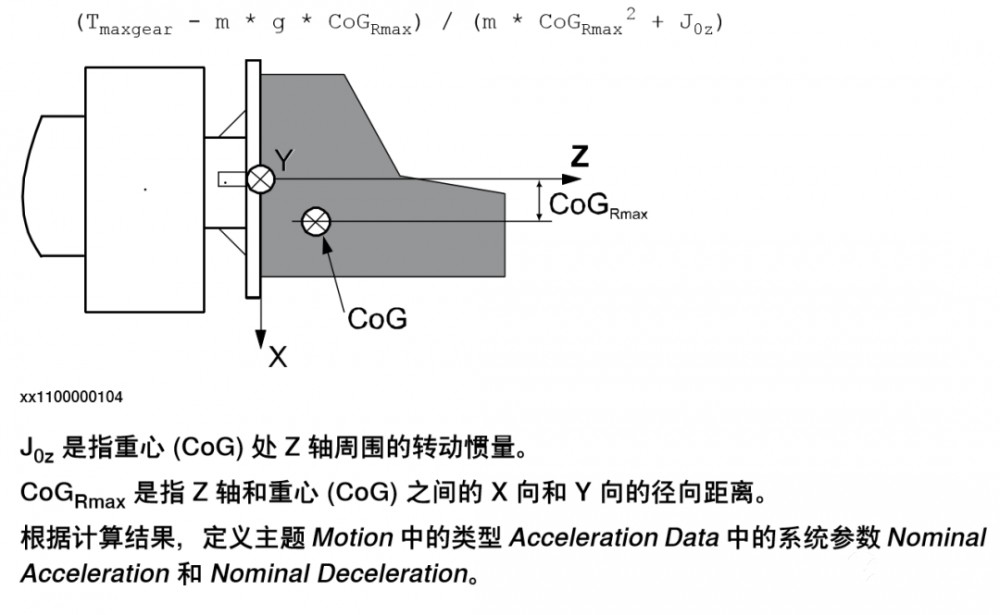
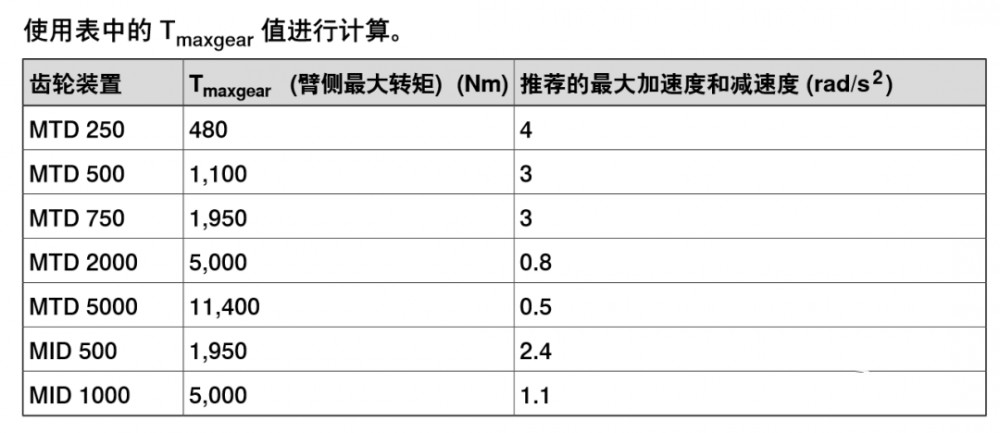
最大化齿轮箱转矩
配置调整
可以调整模板配置文件,以优化性能。最好使用TuneMaster来调整配置数据,或者 按照附加轴的说明进行调整。
TuneMaster是一种便利的PC工具,用于优化运动性能。TuneMaster包含在文件夹 Tools的RobotWare分发中。安装的帮助文件描述了TuneMaster使用方法。
基本调整方法
如何调整取决于所用工具。不过,以下步骤均适用:
1 无载荷试运行,检验是否需要调整。
2 带载荷试运行。
3 如需要,调整配置数据并重复第1至2步。
校准
何时校准
如果更换了传输部件,或者分解器内存丢失,则必须在安装后对机械装置进行校准。可通过微校定义校准零位并可更新转数计数器。操作员手册-带FlexPendant的IRC5和机器人产品手册对ABB机器人校准作了说明。
有关电机换向的说明和有关坐标定位器以及用户框架的说明,请参阅ABB应用手册。
校准位置
任何位置均可定义为校准零位,但是必须可以反复的将轴非常精准的移动到该位置。例如,校准零位既可以是机械止挡,也可以是可以清晰显示该位置的指示器
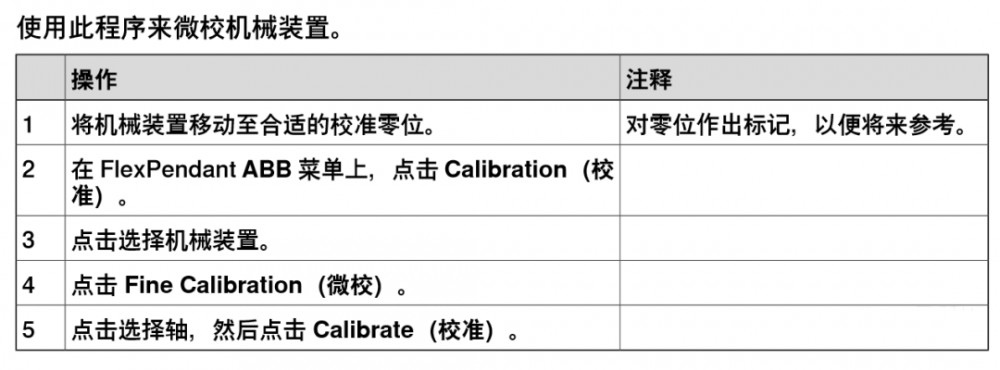
微校机械装置
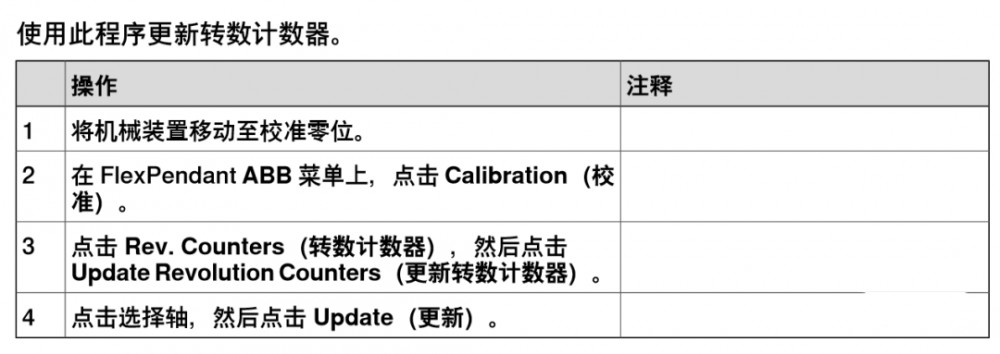
更新转数计数器

好的文章,需要您的鼓励
8

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

上海ABB工程有限公司
 5年
5年



- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-10-24 21:02:58
- 2022-10-14 17:56:03
- 2022-10-23 14:38:05
- 2024-04-11 20:51:04
- 2022-10-16 12:13:17
- 2022-08-03 10:20:40
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









