





新系统可运用磁铁感应外科手术机器人方位
时间:2020-05-25
阅读:8971

现今市场上有各种样式的医疗机器人,能灵活运用的手术机器人设备则拥有非常广阔的应用前景,优势之一就是能在不造成损伤的情况下在身体脆弱部分进行移动。由于这些设备通常是由柔软的软质材料制成的,因此在使用传统的成像技术时并不总是能很好地显示出来。
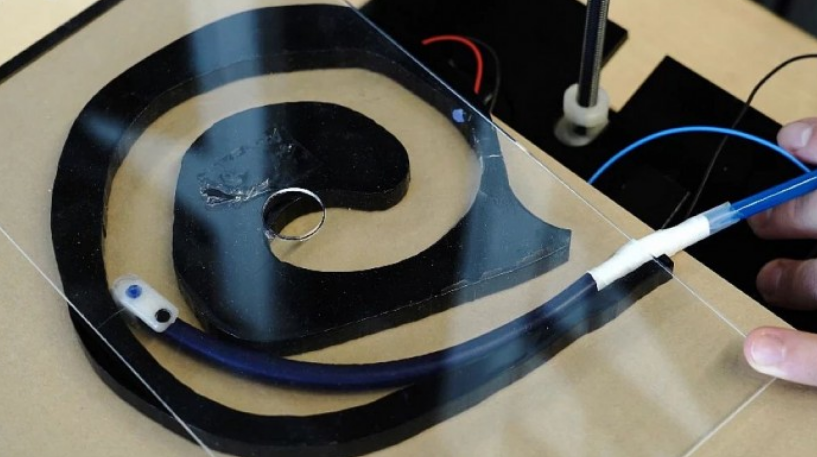
为了寻求更好的替代方法,加州大学圣地亚哥分校的科学团队创造了一个新系统。在该系统中,一个柔性机器人设备的前端装有一个磁铁,当该机器人在一个封闭的环境(最终会进入人体)中移动时,四个有间隔的外部传感器分别测量磁铁产生的磁场强度。
通过一个人工神经网络,系统会比较四个传感器的读数,利用这些数据来准确地确定机器人前端的位置。这与GPS利用多颗卫星,计算出用户的位置的方式类似。
到目前为止,该系统已经在一个基于实验室的模型中成功地进行了测试,使用的是一个尼龙管型的机器人装置,随着液体被泵入其中,它的长度会变长。据报道,整个装置,包括机器人、磁铁、传感器和其他电子装置,只需100美元左右。
手术机器人
医疗机器人
前沿科技

好的文章,需要您的鼓励
6

- 最新资讯
- 最新问答
-
“机器人关节”被TA硬控了
关键字: 美的工业 rv减速机 2024-10-16 -
未来已至:Figure 02机器人引领AI硬件新时代
关键字: 人形机器人 2024-08-13 -
配天观点:具身智能商业化落地之路,道阻且长,但行则必至!
关键字: 配天 具身智能 2024-08-09 -
具身智能:人工智能新纪元,赋能未来科技新引擎
关键字: 具身智能 泰科机器人 2024-07-25 -
科技与艺术交融,BrainCo智能仿生手亮相北京中国国家博物馆丨设计智造与高质量发展特展
关键字: 强脑科技 智能仿生手 2024-07-22
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2024-08-09 15:55:07
- 2022-01-12 09:56:12
- 2019-12-20 17:31:37
- 2019-03-25 14:41:44
- 2019-07-05 13:37:10
- 2019-02-27 16:02:02
- 2022-08-29 10:20:44
- 2022-08-11 07:20:50
- 2022-08-31 10:51:10
栏目推荐
- 2024-10-16
- 2024-08-13
- 2024-08-09
- 2024-07-25
- 2024-07-22
- 2024-07-18
- 2024-07-18
- 2024-07-18
- 2024-01-29
- 2024-01-16









