





具备医学潜力的软性制动器可引入机器人领域

刚性电磁执行器具有多种应用,但是其体积大的特性限制了人与执行器的集成或人与机器人协作。在关于科学进步的新报告中,郭永勇和奥地利林茨约翰·开普勒大学软质物理和软材料领域的科学家团队介绍了软电磁致动器(SEMA),以嵌入在金属中的液态金属通道代替固态金属线圈。弹性壳。科学家展示了用户友好,简单且可扩展的结构,具有快速和持久的可编程性。
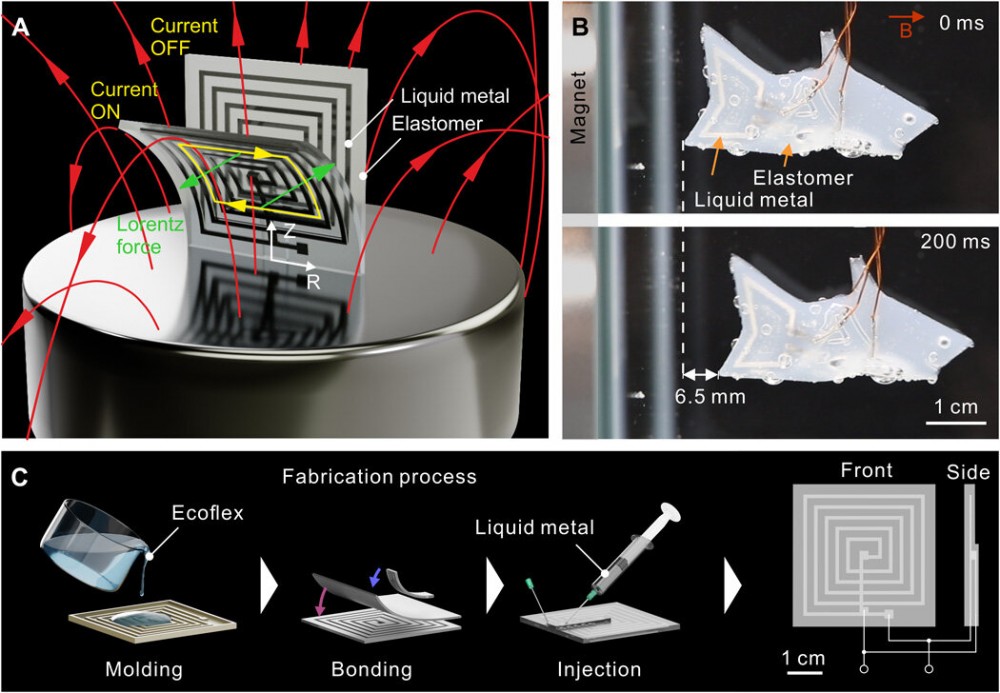
SEMA的工作原理和制造过程。(A)在磁场中承受电流负载的SEMA的原理性工作原理。(B)由SEMA(尾巴和鳍;电影S1)驱动的游泳软鲨。(C)SEMA制造的主要步骤:模制有机硅弹性体,粘合到弹性体片上以制造通道,最后注入液态金属。成品方形SEMA的正面和侧面布局,液态金属的两端均连接到控制系统。
他们设计了一个基于SEMA的柔软微型鲨鱼和一个带有独立控制花瓣的多层螺旋花,以及一个立方SEMA以执行任意运动序列。该团队采用了一个数值模型来支持设备的小型化,并通过提高机械效率来降低功耗。SEMA是电控制的形状记忆系统,其应用程序可为微创医疗应用程序赋予软抓手功能。科学家们强调了小尺寸和多线圈SEMA在医学上有希望的应用的实用性,就像在经典科幻电影《神奇之旅》中一样实际上,毛等人的目标是开发和部署基于SEMA的先进微型机器人,以用于未来医疗应用,包括纳米级药物输送和组织诊断。
机器人及其应用
机器人被积极地引入各种技术领域,从工业生产到自动运输,公共安全,以及作为医学的个人助手,与人类紧密接触。机器人通过引导磁共振成像(MRI)进行手术的使用正受到关注,未来的应用将寻求促进安全的人机交互。
自从1821 年迈克尔·法拉第(Michael Faraday)展示了基本的电动马达以来,构成传统机器人核心的电磁马达发生了许多变化。用于此类设备的刚性材料(例如铜或铁)之间的相互作用可能有害于与人体的协作,这对开发对各种触发器(包括热,湿度)敏感的新型和软功能执行器构成了主要缺陷,pH、光和电场或磁场。此外,软功能执行器受到响应速度慢和在实际应用中难以精确控制的限制。因此,对结构和材料进行改造以进行工程设计更为实用。软电磁致动器(SEMA)。
由SEMA驱动的游泳软鲨。SEMA充当尾巴和鳍。驱动电流为方波,频率为3 A @ 4 Hz。鱼被放置在磁体的中心,鱼的轴线沿着板状磁体的不对称轴。打开和关闭电流会驱使鲨鱼穿水。
设计和开发高性能软电磁致动器(SEMA)
在这项工作中,研究人员提出了几种设计和开发高性能软电磁致动器的方法,这些致动器为机器人的软形式提供动力。他们探索了六种主要的设计策略,其中新型的SEMA用嵌入在柔软的弹性体外壳中的液态金属通道代替了常规直流(DC)电机的坚硬结构。按照其工作原理,当电流通过导电通道时,单线圈方形SEMA将弯曲,从而使其可用作软机器人的电动机。他们使用的驱动电压低于1 V,这是无害的,甚至允许水下功能。科学家们用由SEMA制成的鳍和尾巴制成的游泳鲨鱼证明了这一概念。研究人员将SEMA建模为磁场中的一系列导线,并根据洛伦兹力定律,并检查了磁场的分布,以设计和激活SEMA。
在这项工作中,研究小组使用了一块平板磁铁,并通过实验和模拟对定量磁场进行了表征。结果表明,需要较低的电阻来操作SEMA,研究人员(2002年)通过使用液态金属作为结构中的可拉伸导体来实现。他们将模塑作为一种节俭的方法,以实现精确图案化的弹性体和密封良好的液态金属通道。
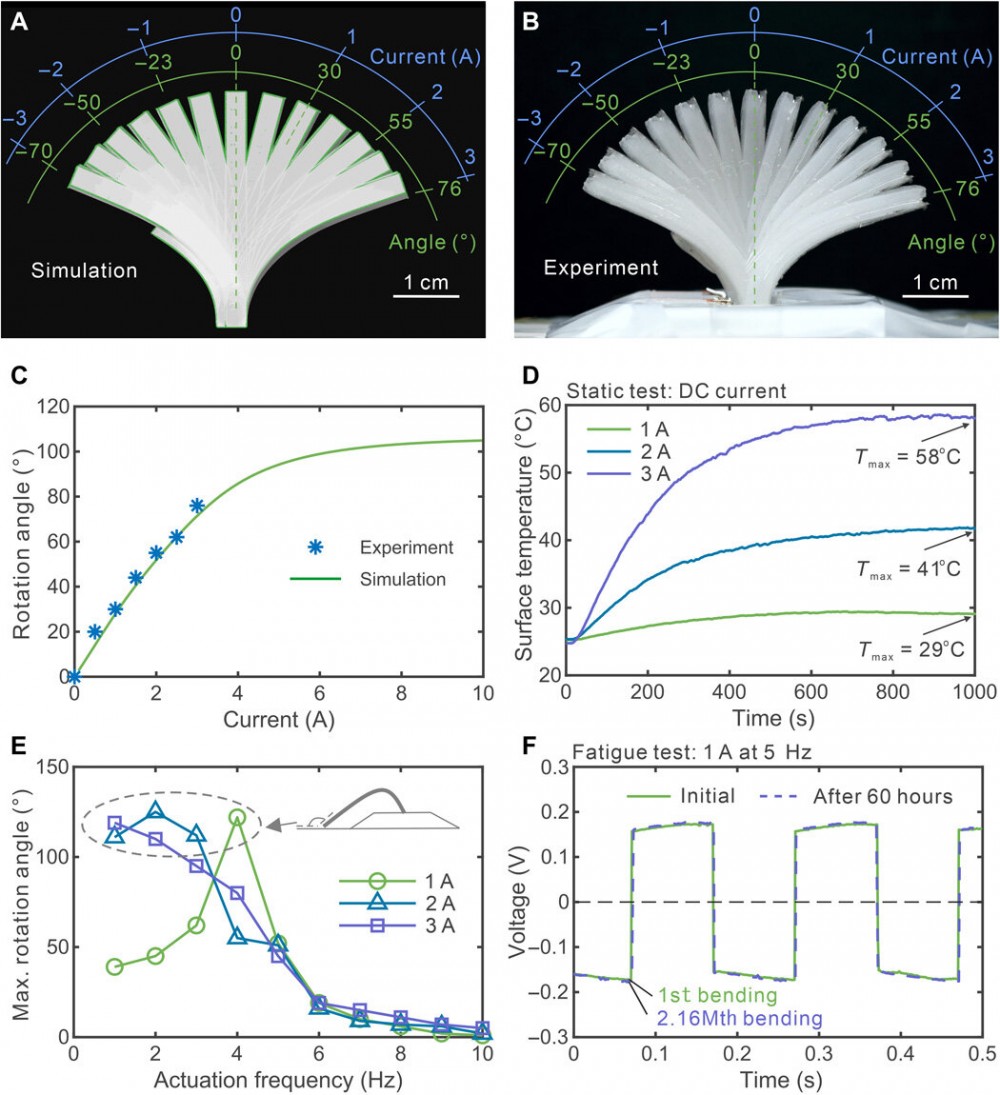
单线圈方形SEMA的特性。在1至3 A的直流电流下,SEMA的旋转角度(A)在模拟中预测,而(B)在实验中观察到。(C)SEMA的旋转角度作为电流的函数,用于实验和仿真。(D)对于三个特定的直流电流值(1、2和3 A),SEMA的表面温度随时间变化。(E)在方波电流作用下,弯曲的SEMA的最大旋转角度,其幅度和频率都变化。插图:最大旋转角度受执行器接触地面的限制。(F)在1 A的电流下以5 Hz进行的疲劳测试。在测试开始和结束时的电压降与时间的比较表明,第一个弯曲周期和第2.16 Mth弯曲周期完全重叠,证明了其高耐久性SEMA。
优化SEMA以改善性能和概念验证应用
通过增加实验中的磁场,科学家增加了驱动结构的应变能。它们也可以通过增加电流幅度来增加SEMA的应变能,尽管焦耳热效应可能会增加装置中的热量和温度。该团队通过添加诸如铜之类的导电颗粒来改善设备性能,从而降低了SEMA的电阻。然后进行了一系列驱动频率测试,以调查SEMA的性能。他们使用了长时间的疲劳测试(以5 Hz的频率驱动60小时),并展示了单线圈方形SEMA如何在不改变性能的情况下弯曲216万次。然后,科学家通过多种技术将 SEMA小型化。
鱼尾SEMA的功能。像SEMA这样的鱼尾被放置在水箱的底部,以证明在水中安全运行,并且由于较低的驱动电压而无需额外隔离。放置在水箱下方的平板磁铁施加的磁场使SEMA在施加3 A方波电流时像鱼尾一样摆动。在实验开始时滴入水中的固体蓝色染料迅速混合,显示出SEMA的高性能。
为了进一步确定SEMA的力量,该团队建造了一个双线圈方形,以提供比单线圈版本更大的力量。SEMA的最大输出功率约为57 mW,而最大功率密度达到5.3 mW / g。随着时间的流逝,效率随着电流的增加而降低,而大多数功率则作为热量散发到环境中。经过优化,团队注意到与其他类型的软功能执行器相比,SEMA具有显着的灵活性。作为概念验证,他们开发了几种构造,包括搅拌器形式的鱼尾SEMA和带有五个花瓣的花朵SEMA。多线圈花SEMA表现出高度的可编程性,每个花瓣充当单个花瓣,可在任意磁场中起作用。

多线圈花SEMA由五个可单独控制的单踏板组成。单个花瓣在电流从0到5 A切换时的动态仿真表明单个花瓣的变形。此外,单个花瓣被顺序地致动,并且所有它们同时被致动。花瓣以10毫秒,50毫秒,100毫秒和1 s的时间间隔一一驱动,显示出我们的SEMA出色的动态性能。
通过这种方式,郭永勇及其同事介绍了一系列用于高度受控快速致动的SEMA,它们的软体和低驱动电压在与生物体和易碎物体接触时不会产生干扰。实验和理论分析预测,在强烈磁场作用下,SEMA可以保持高能量密度,功率密度和效率。对SEMA进行了有效控制并易于编程,从而可以对复杂的执行器中的软机器人元件进行单独操作,如花SEMA所示。进一步的数值和实验分析使研究小组可以提高结构的功率输出和机械效率。这项新工作将在精确的药物输送,组织诊断和细胞操作方面得到广泛的应用。

好的文章,需要您的鼓励
8

- 最新资讯
- 最新问答
-
“机器人关节”被TA硬控了
关键字: 美的工业 rv减速机 2024-10-16 -
未来已至:Figure 02机器人引领AI硬件新时代
关键字: 人形机器人 2024-08-13 -
配天观点:具身智能商业化落地之路,道阻且长,但行则必至!
关键字: 配天 具身智能 2024-08-09 -
具身智能:人工智能新纪元,赋能未来科技新引擎
关键字: 具身智能 泰科机器人 2024-07-25 -
科技与艺术交融,BrainCo智能仿生手亮相北京中国国家博物馆丨设计智造与高质量发展特展
关键字: 强脑科技 智能仿生手 2024-07-22
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2024-08-09 15:55:07
- 2022-01-12 09:56:12
- 2019-12-20 17:31:37
- 2019-03-25 14:41:44
- 2019-07-05 13:37:10
- 2019-02-27 16:02:02
- 2022-09-16 08:43:01
- 2024-10-16
- 2024-08-13
- 2024-08-09
- 2024-07-25
- 2024-07-22
- 2024-07-18
- 2024-07-18
- 2024-07-18
- 2024-01-29
- 2024-01-16









