





ABB机器人报错代码:关机时操纵器崩溃和机器人制动闸释放问题
时间:2020-08-25
阅读:16591

3.14 关机时操纵器崩溃
描述
在Motors ON 活动时操纵器能够正常工作,但在Motors OFF 活动时,它会因为自身
的重量而损毁。
与每台电机集成的制动闸不能承受操纵臂的重量。
后果
该故障可能在该区域工作的人员造成严重的伤害或者造成死亡,或者对操纵器和/或周
围的设备造成严重的损坏。
可能的原因
该症状可能由以下原因引起(各种原因按概率的顺序列出):
• 有故障的制动器。
• 制动器的电源故障。
建议的操作
建议执行以下操作(按概率列出):

3.15 机器人制动闸释放问题
描述
在开始机器人操作或者微动控制机器人时,必须松开内部制动闸以允许移动.
后果
如果没有松开制动闸,机器人不能移动,并且会发生许多错误记录信息。
可能的原因
该症状可能由以下原因引起(各种原因按概率的顺序列出):
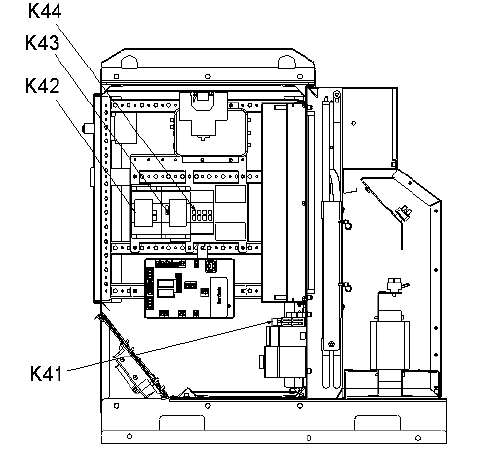
• 制动器接触器(K44) 没有正确工作。
• 系统未正确进入Motors ON 状态。
• 机器人轴上的制动闸发生故障。
• 24V BRAKE 电源电压掉电。
建议的操作
此节详细说明在机器人制动闸未释放时如何继续操作.


报错代码
abb
abb机器人
技术干货

好的文章,需要您的鼓励
0

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-10-24 21:02:58
- 2022-10-14 17:56:03
- 2022-10-23 14:38:05
- 2024-04-11 20:51:04
- 2022-10-24 19:54:03
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









