





【ABB】ABB机器人如何使转弯半径zonedata可视化
时间:2020-09-02
阅读:39897

ABB机器人RAPID指令中,通过转弯半径zonedata来定义机器人是否精确到达某个点或者提早拐弯。
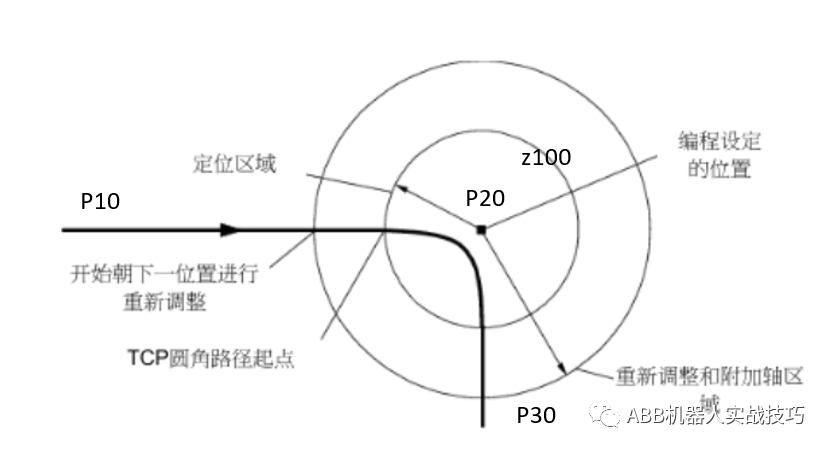
2. 例如以下语句表示机器人到达目标点P20的100mm的范围内,开始向下一个位置拐弯
MoveL P10,v200,z100,tWeldGunWObj:=wobj0;
MoveL P20,v200,z100,tWeldGunWObj:=wobj0;
MoveL P30,v200,z100,tWeldGunWObj:=wobj0;
3. 在Robotstudio中,可以可视化的展示各区域数据,方便前期判断轨迹,例如下图为z100效果

4.在创建完轨迹后,右击对应轨迹,“查看”-“显示各区域”,则可以看到当前轨迹的zonedata效果。
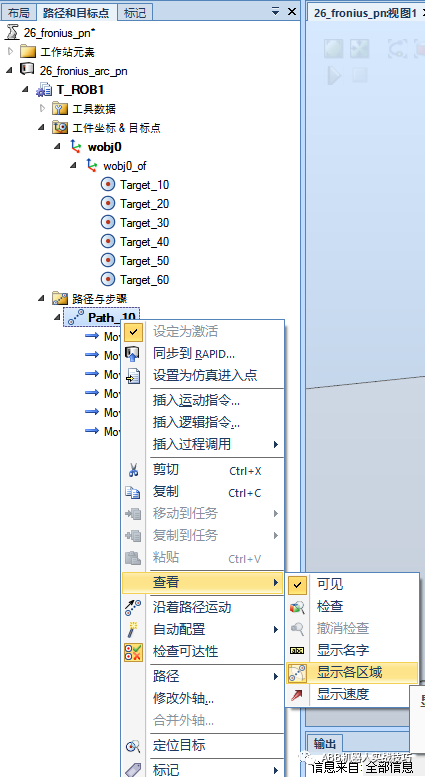
5. 也可以批量修改zonedata数据,选择需要调整的轨迹,右击,“修改指令”-“区域”,选择区域


上图显示z10转弯半径效果
abb
abb机器人
技术干货

好的文章,需要您的鼓励
1

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐
上海ABB工程有限公司
 5年
5年



相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-10-24 21:02:58
- 2022-10-14 17:56:03
- 2022-10-23 14:38:05
- 2024-04-11 20:51:04
- 2022-10-16 12:13:17
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









