





家政机器人必不可少的机械手伙伴


图1. 摆放拖鞋的智能机器人
家政机器人和特别设计的机械手
现代都市人繁忙的工作一天后,回家只想摊在沙发上“葛优躺”,可熊孩子(或是二哈!)总会把玩具乱扔一地,把客厅弄得乱七八糟,头疼死了!笔者从小没少幻想,如果有一天有机器人来帮忙就好,一声令下机器人运作起来,毫无怨言的把屋子收拾干净,省心又省力!
图2. 被家务困扰的现代都市人
收拾屋子听起来是一项简单而重复的任务,捡起来东西来放到该放的地方不就好了?但其实如果要用机器人来完成这项任务,里面学问可真不少!在工业自动化中,基于机器视觉的物体识别早已经被广泛采用,不过当我们把情景换到客厅就复杂多了,家中物体多种多样,更不用说散落四处,不像流水线摆放的如此整齐。
来自日本的公司Preferred Networks有一支研究团队就致力于研发可以自主清洁屋子的机器人,并且取得了一定的成果。他们研发的全自动整理机器人系统,还真能让你一声令下之后,自动把杂乱的客厅收拾的干干净净!
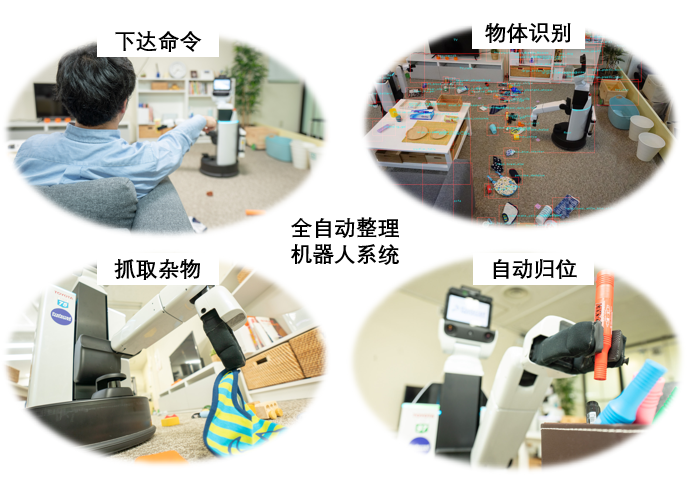
图3. 日本PreferredNetworks公司研发的整理机器人系统
PreferredNetworks运用最尖端的深度学习技术开发了画面识别引擎(基于NVIDIA Tesla V100的超级电脑MN-1b)并且进行卷积神经网络的训练,使机器人可以分辨掉落在地上的各种物体。哪怕数百种物品散乱在房间各处,他们设计的机器人系统也能够识别出物品的位置和种类。
图4. 机器人可以识别并记忆屋子里物体的位置
一旦识别之后,机器人就按照预定好的路径对每一件物品进行抓取,并且归类到每个物品应该处于的正确的位置(目前来看速度偏慢)。

图5. 机器人开始收拾
图6. 机器人快收拾完毕
人类的生活空间里存在着各种各样的物体,如果是水瓶,拖鞋这些机器人还比较好抓,一旦遇到像是手帕,纸巾,书本这类薄软的物体掉落在地面,抓起它们可真的是为难大部分机械手了。今天小编向大家介绍的是Preferred Networks的工程师专门设计的一款新型机械手,为了解决以上提到的家务劳作中常见的抓取问题。该机械手的相关论文于近日发表于国际著名机器人期刊《IEEE Robotics and Automation Letters》。

图7. 新推出的万能机械手
这款机械手的最大亮点就是可以快速可靠的捡起地面上薄而软的物体,例如一本书,一件衣服等。关键结构就是位于一侧指尖上的一个可以滑动的小皮带。虽然在指尖添加一个额外的自由度不算是很新的设计思路,该机械手只用了一个电机就实现了功能,极大的降低了控制复杂性和成本。
我们先一起领略这款机械手的抓取能力,下一部分简单介绍机械手的结构设计和相关测试。文末附有完整视频和相关文章链接,感兴趣的童鞋不要错过喔!
机械手可以夹起一片贴在桌子表面的硅胶(对于人手来说都有一点难度)。

图8. 捏起一片硅胶薄片
机械手可以轻松捏起一只笔。
图9. 捏起一只笔
机械手轻松捏起一只小球。
图10. 捏起一只小球
机械手可以抓取大小不同的薄片状物体。
图11. 抓取不同大小的薄物体
图12. 抓取不同尺寸的柱形物体
机械手可以抓取家中常见的装满液体的柔软的袋子(洗衣液)。
图13. 抓取柔软的袋装物体
机械手展示抓取不同大小和不同形状的物体。
图14. 抓取不同形状的物体
结构设计和测试
Preferred Networks的工程师设计的这款机械手,巧思之处就在于只用了一个电机,就实现了包括抓取和指尖滑动结构的同时控制。机械手的结构设计如下图,设计者采用了一根贯穿两根手指和整个手掌的驱动绳子,绳子同时也驱动了手指内侧的滑动带。绳子右端连接的线性滑块和弹簧是帮助实现抓取的关键结构。
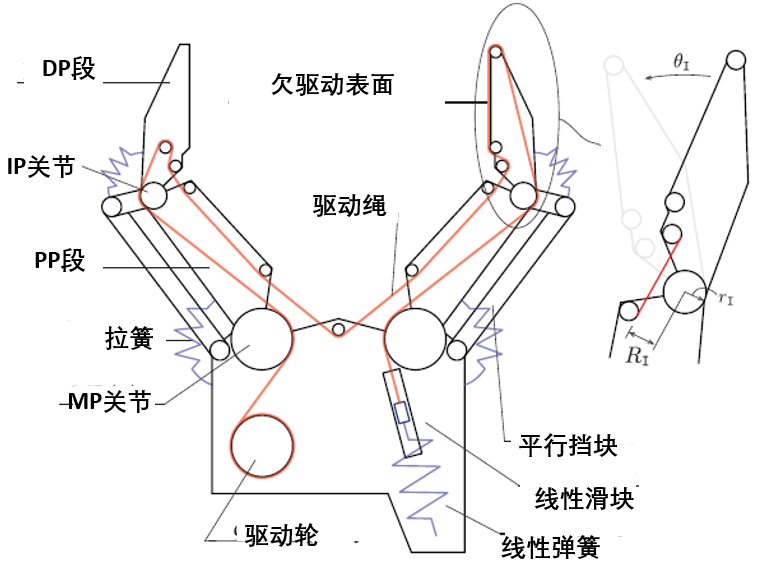
图15. 机械手的结构设计
机械手的抓取过程分成三个步骤(下图中的a, b, c):在第一个步骤,手指在电机的驱动下靠近物体。在这个阶段,滑动模块的弹簧刚度大于手指关节处的弹簧刚度,因此手指的滑动带保持不动,机械手如同普通的平行夹爪一样靠近物体。
在第二个阶段,当手指和物体接触以后,电机扭矩增加,绳子的拉力大于滑动块的预紧力,因此导致滑动块开始滑动,随之而来的是指尖滑动带向着手掌内侧滑动,从而把物体拉向机械手内侧,这也正是抓取薄形的物体的关键!
第三个阶段,滑块到达了结构终点,机械手此时表现为一个欠驱动的机械手结构,电机的扭矩被完全加载到关节上,从而继续抓紧物体。
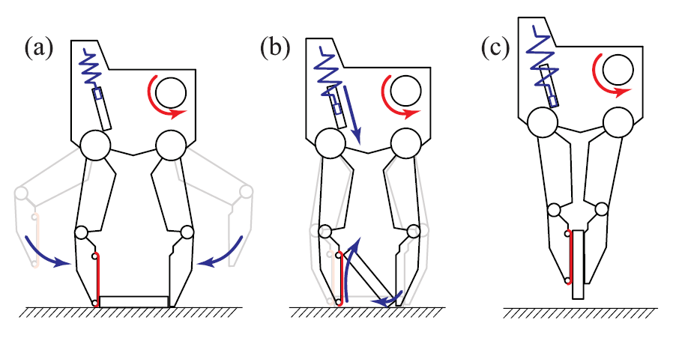
图16. 机械手的抓取过程
借助于这样的结构设计,无需过于复杂的控制,机械手就可以抓取很多薄而软的物体,例如3mm厚度的脚垫,以及软皮书。
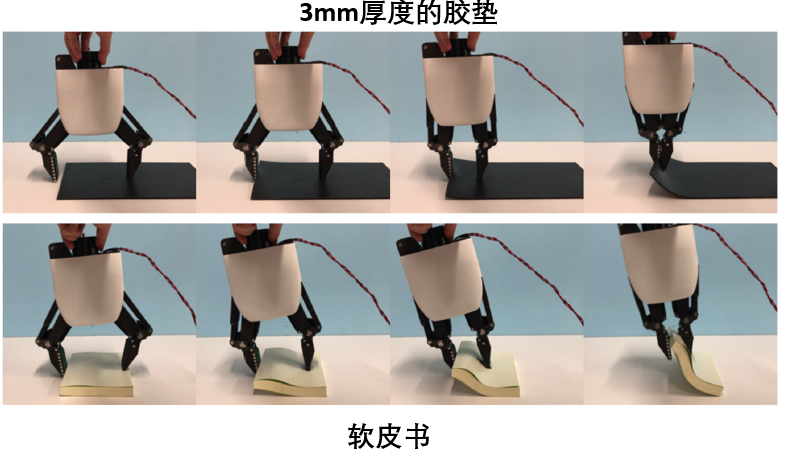
图17. 机械手可以从桌子上抓取3mm厚的胶垫和软皮书
研究者还设计实验测试抓取了一些对于大多数机械手来说基本上不可能抓的起的超薄物体。例如布料,塑料袋,纸巾,以及A4纸。可以看到,借助于指尖的滑动结构,这种又软又薄的物体的抓取也不在话下!

图18. 机械手抓取超薄的纸巾和布料等物品
未来展望
总的来说,这款机械手借助于简单但是精妙的结构设计,实现了一般机械手难以抓取的能力,同时又没有提升机械手的控制难度。从笔者的角度来看,在抓取薄而软的家中常见物体方面,真的是很少有机械手可以和它相匹敌。这款机械手不愧是专门为了整理杂物机器人而设计的,客厅散落的物体必定有很细的笔,或者是很薄的衣物,书本等,这款机械手基本上很好的解决了这一类物体的抓取问题,从而让机器人抓取的成功率更高!
图19. 听话的机器人
虽然目前来说,机器人的整理速度还是比较缓慢,但笔者相信,随着各个方面综合技术的发展,这样的机器人终有一天会走入每个人的家庭,就好像洗衣机和洗碗机一样,成为必不可少“家用电器”,为你我分担生活的烦恼!

好的文章,需要您的鼓励
18

- 最新资讯
- 最新问答
-
“机器人关节”被TA硬控了
关键字: 美的工业 rv减速机 2024-10-16 -
未来已至:Figure 02机器人引领AI硬件新时代
关键字: 人形机器人 2024-08-13 -
配天观点:具身智能商业化落地之路,道阻且长,但行则必至!
关键字: 配天 具身智能 2024-08-09 -
具身智能:人工智能新纪元,赋能未来科技新引擎
关键字: 具身智能 泰科机器人 2024-07-25 -
科技与艺术交融,BrainCo智能仿生手亮相北京中国国家博物馆丨设计智造与高质量发展特展
关键字: 强脑科技 智能仿生手 2024-07-22
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2024-08-09 15:55:07
- 2022-01-12 09:56:12
- 2019-12-20 17:31:37
- 2019-03-25 14:41:44
- 2019-07-05 13:37:10
- 2019-02-27 16:02:02
- 2023-05-22 14:07:23
- 2023-05-22 14:15:44
- 2023-01-11 14:15:15
- 2023-01-27 15:18:18
- 2018-09-12 17:15:57
- 2018-12-24 12:45:04
- 2024-10-16
- 2024-08-13
- 2024-08-09
- 2024-07-25
- 2024-07-22
- 2024-07-18
- 2024-07-18
- 2024-07-18
- 2024-01-29
- 2024-01-16









