





灵活掌握球体!德国FZI让机械手像人手一样自适应抓取各种物体

拟人化灵活抓取的挑战
随着进化,人类拥有先进而灵活的抓握能力。人类利用大脑控制回路的组合共同作用让手抓取物体。根据传感器的反馈,如果物体移动或变形,手可以适应其运动,这称为软抓取。拟人化的手进行软抓握是机器人在环境中与人形物体交互的重要功能。但是,大多数机器人使用真空、两指或定制的抓爪,这对于生产应用设计编程来说很方便,但是在不知道其确切抓握对象属性的情况下将大大降低机械手的适应性。
解剖学上对人类的手进行了详细的研究,有学者在文献中详细分析了人手具有27个自由度,这种结构的灵活性是两指等特制抓爪所无法提供的。正是因为这种灵活性,人类的手可以针对不同的任务,使用不同的工具,完成对应的任务要求。无论是抓取,还是捏挤,配合上人类的大脑控制,这种任务对我们来说十分容易。
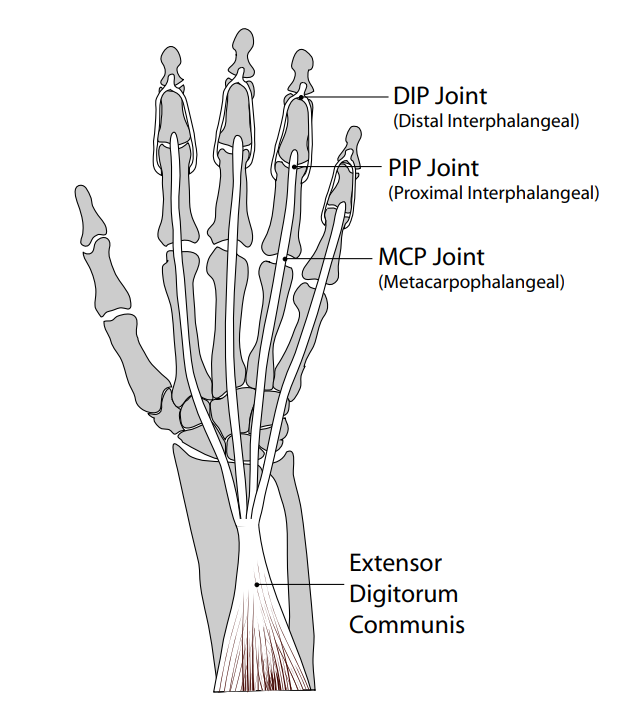
图2 人手关节结构
但是对于大多数机械手而言,要实现拟人化灵活的抓取、捏挤动作,目前而言依然是一大挑战。传统机器人系统控制必须进行大量计算,而拟人化的机械手首先机械结构十分复杂,实现其灵活控制则更是需要设计复杂的控制系统,同时采用各种传感信息才有可能,而这依然无法保证其可靠性与安全性,这严重限制了灵活拟人化机械手的广泛应用与商业化。

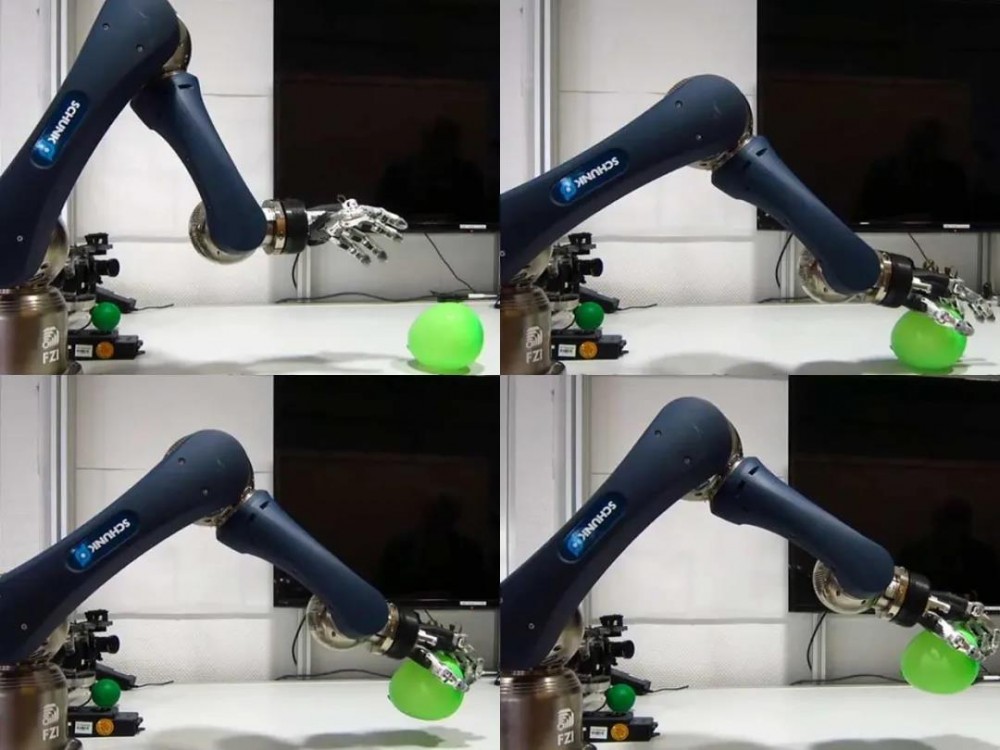
图3 机械手抓气球
最近的一项研究中,德国信息技术研究中心(Forschungszentrum Informatik)的科研人员提出一种基于尖峰神经元(Spiking Neuron)的机械手控制系统。该系统被尝试应用于Schunk SVH 5指手上,实现了对不同形状、大小和刚度物体的灵活适应抓取。相关研究发表于国际期刊《IEEE Robotics and Automation Letters》上。

图4 Schunk SVH 5指手
SchunkSVH 5指手,其手指和关节的数量与人的手相同,每个手指可单独控制。
研究人员的将控制系统应用在Schunk SVH 5指手上,在不知道目标对象属性的情况下取接近物体、抓取物体并松手物体交给人。

图5 抓取水瓶的一系列动作

图6 抓取水瓶
SchunkSVH 5指手可以顺利找到水瓶,并抓握起水瓶,然后顺利将其交到人手上。
图7 抓气球
此外,研究人员还进行了多种不同物体的实验,分别抓取圆柱形气球、笔、小黄鸭、圆形气球以及一包纸巾。实验表明该控制系统使得机械手拥有灵活强大的抓取性能。
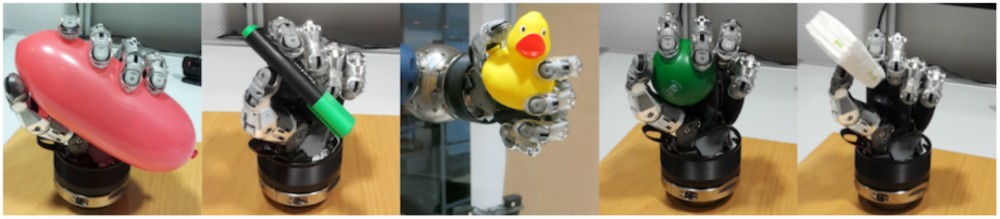
图8 分别抓取不同物体
基于“尖峰神经元”的机械手控制系统
这种技术的关键是所谓的尖峰神经元(Spiking Neuron)。就像人类大脑中的真实神经元一样,尖峰神经网络(SpikingNeural Network, SNN)中的人工神经元也同时进行信息的编码与处理。研究人员受到人类大脑的启发,对SNN进行了深入研究,这种方法可能会让我们深入了解生物神经网络的功能机理,包括我们人类自己的神经网络。
“人形机器人或受生物启发的机器人的编程非常复杂,”德国FZI 研究中心的研究科学家Juan Camilo Vasquez Tieck说。“而且传统的机器人编程方法并不总是适合于其特殊的使用环境及功能要求。”
Tieck说,传统的机器人系统必须执行大量的计算,才能跟踪轨迹并抓住物体。但是若把人看成是一个依赖于SNN的机器人系统,则首先要训练其神经网络(训练人如何抓握物体),以更好地模拟系统和物体运动(从而对不同大小、形状及刚度的物体都有极好的适应性)。之后,它可以实时适应运动,更加自主地抓取物品(人类可以适应不同物体的抓取任务)。
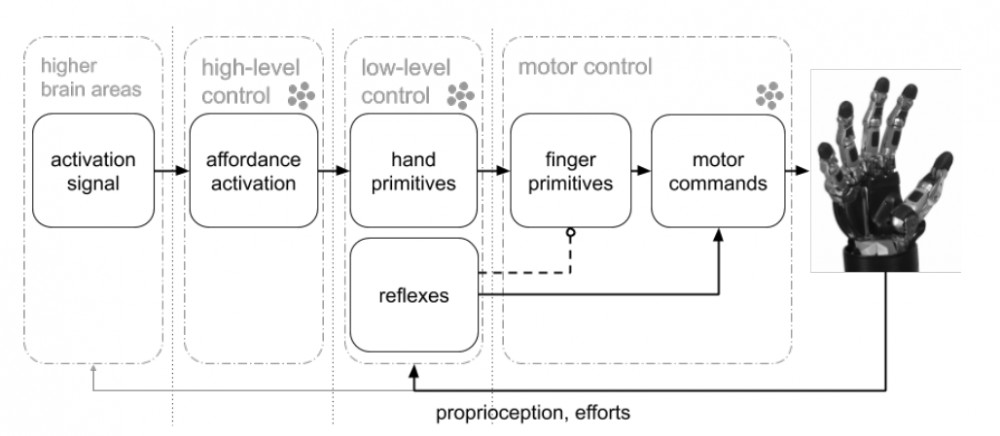
图9 基于SNN电机驱动手闭环控制结构概图
该机械手由电机驱动,研究人员将SNN集成到他们的系统中,并将其分为几个子网,每个子网单独控制每个手指的驱动电机,进而使手指弯曲或伸展,通过五个手指的配合,最终实现机械手像人手一样对物体进行灵活抓取、挤捏。
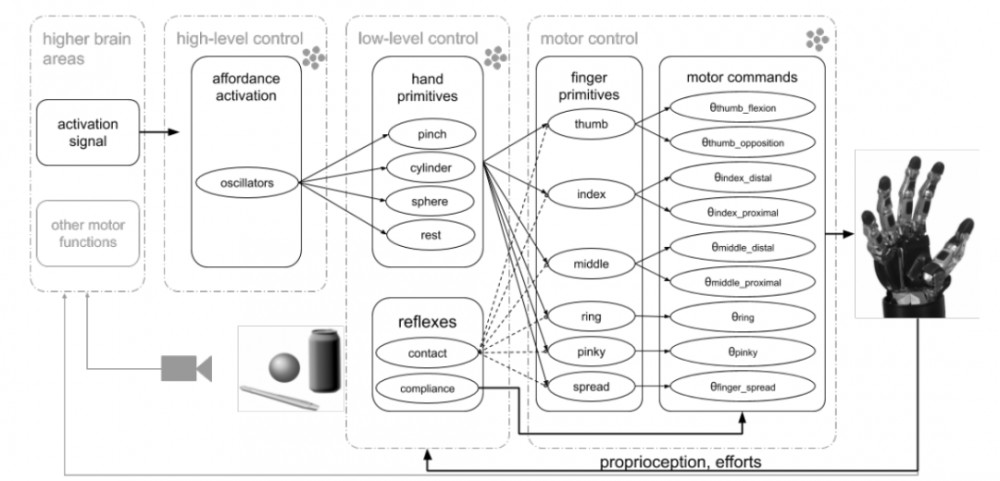
图10 基于SNN电机驱动手闭环控制结构详图
对于每个手指,神经电路都会使用电机的电流和关节的速度反馈来检测机械手是否与物体发生接触。当检测到与物体的接触时,控制手指灵活抓取的控制器便被激活,以调节手指施加的力,最终实现其灵活抓取功能。
Tieck说:“通过这种控制方式,通用抓握运动可以适应具有不同形状、刚度和大小的对象。”如果物体移动或变形,该系统还可以快速适应,继续完成对其的抓握动作。
下图分别展示了机械手的碰撞接触检测环节、机械手级联兼容控制环节以及控制器的在线自适应学习环节。
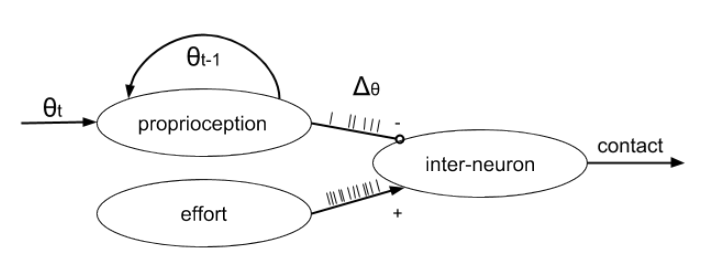
图11 接触检测环节
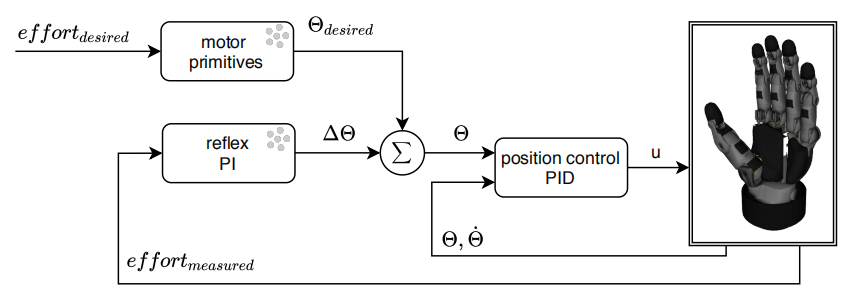
图12 机械手级联兼容控制器
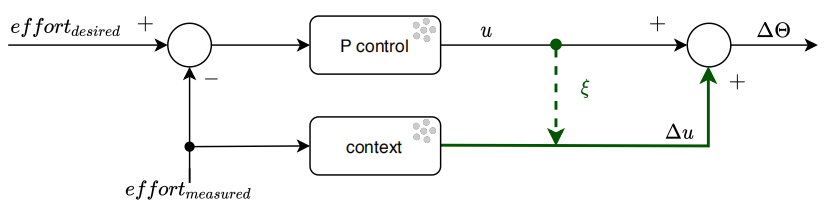
图13 在线自适应学习环节(级联兼容控制器种“reflex PI”部分)
该级联兼容控制器保证了机械手具有较高的敏感性,通过改变不同阈值可以实现机械手对物体不同力度的抓握。下图所示分别是较高阈值用力抓握气球和较低阈值轻轻抓握气球。对比可以看出,应用该控制系统可以实现机械手灵活的抓取,像人一样可以随物体特性而自动适应。
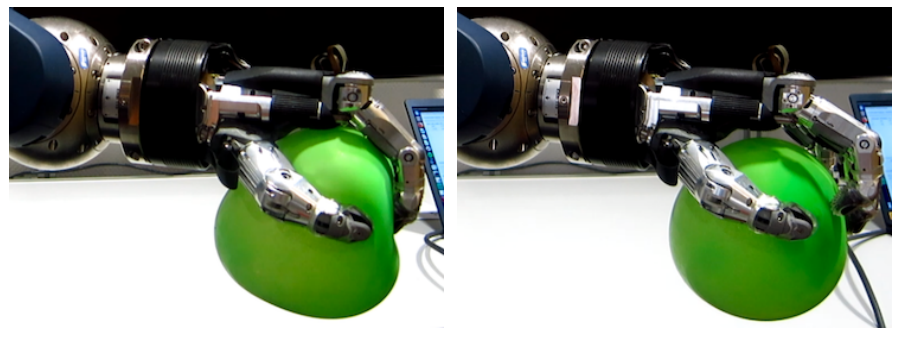
图14 不同力度抓握气球
总结与展望
受生物启发而提出的SNN,通过组合的控制环并使用电机的电流、关节速度等反馈信号,可以用拟人化的机械手进行软抓取。实验表明,无需计算逆向运动学或复杂的接触点规划,机械手即可捕获具有不同形状,刚度和大小的对象。
Tieck说:“对于这种方法,下一步是整合基于事件摄像机的视觉信息,并将手臂运动与SNN集成在一起。此外,我们想用触觉传感器来伸出手。”
对于未来的研究计划,他说,长期目标是开发“一种系统,该系统可以执行与人类类似的抓握,而无需深入计算规划接触点或进行严格的稳定性分析,并且能够通过视觉和触觉反馈适应更多不同的对象。”未来,科研人员们将会进一步提高控制系统可靠性、快速性及机械手的适应性,从而更好的应用于机器人上,服务人类的生活。

好的文章,需要您的鼓励
2

- 最新资讯
- 最新问答
-
未来已至:Figure 02机器人引领AI硬件新时代
关键字: 人形机器人 2024-08-13 -
配天观点:具身智能商业化落地之路,道阻且长,但行则必至!
关键字: 配天 具身智能 2024-08-09 -
具身智能:人工智能新纪元,赋能未来科技新引擎
关键字: 具身智能 泰科机器人 2024-07-25 -
科技与艺术交融,BrainCo智能仿生手亮相北京中国国家博物馆丨设计智造与高质量发展特展
关键字: 强脑科技 智能仿生手 2024-07-22 -
保障六维力传感器在医疗机器人使用中的数据安全和隐私保护
关键字: 六维力传感器 鑫精诚 2024-07-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2024-08-09 15:55:07
- 2022-01-12 09:56:12
- 2019-12-20 17:31:37
- 2019-03-25 14:41:44
- 2019-07-05 13:37:10
- 2019-02-27 16:02:02
- 2023-05-22 14:07:23
- 2023-05-22 14:15:44
- 2023-01-11 14:15:15
- 2023-01-27 15:18:18
- 2018-09-12 17:15:57
- 2018-12-24 12:45:04
- 2024-08-13
- 2024-08-09
- 2024-07-25
- 2024-07-22
- 2024-07-18
- 2024-07-18
- 2024-07-18
- 2024-01-29
- 2024-01-16
- 2024-01-10









