




【艾利特】现场直击 | 2023 IARS今日开幕,艾利特展位现场人气爆棚!

2023华南机器人展IARS在东莞厚街会展中心盛大开幕,即日起至5月25日,为期三天。艾利特作为协作机器人一站式解决方案制造商,本次展会携带10大工站应用方案、前沿新品参展。聚焦科技创新和先进制造,展示智能制造最新成果,针对市场需求精准匹配应用场景。
凭借引领全球的协作机器人产品表现力,艾利特成展会名副其实的“人气王”,让世界看到中国品牌的力量。
本届展览面积4万平方米,近500家来自各个国家的知名企业参展,智能制造装备类参展企业占比达95%以上,借助展会全方位展示东莞智能制造实力。

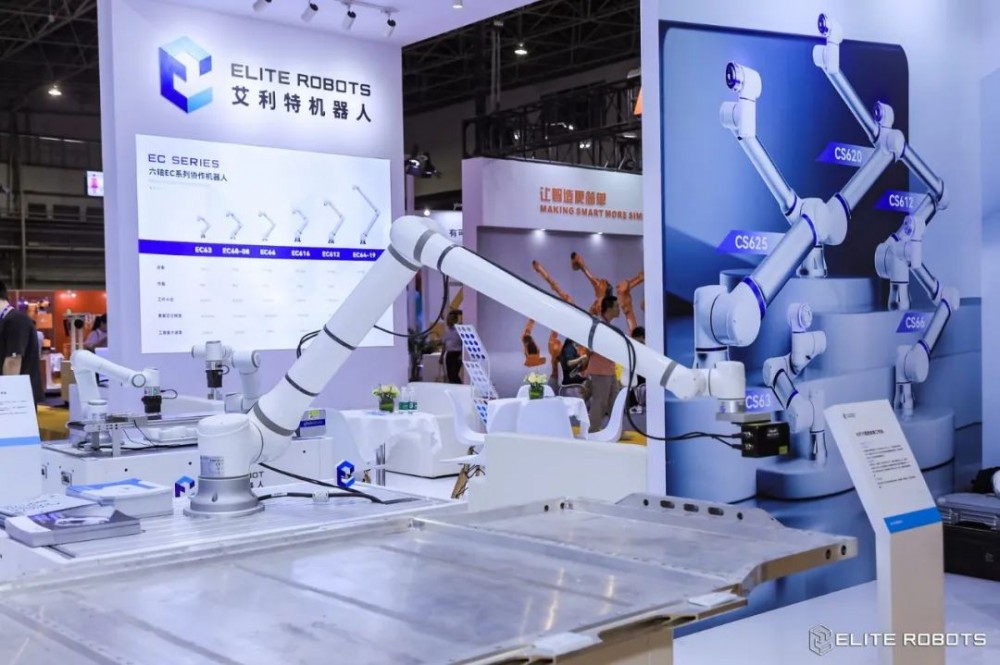
会展馆外热浪翻滚,馆内亦是人潮涌动,广大友商莅临艾利特机器人展位驻足观看,咨询洽谈。EC64-19、CS620、EC68-08等新品协作机器人受到广泛赞誉,现场工作人员为客户讲解艾利特产品特色和优势、剖析市场,认真细致地解答每一位客户的疑问,耐心仔细地倾听每一位来宾的需求。

即刻预约
超多精彩不容错过!

艾利特诚邀您至展会现场一起探讨协作机器人如何赋能工厂柔性智能制造,为您解读、展示艾利特在各行业领域的成熟应用案例。

请扫描下方二维码,进入艾利特展会预登记页面(特别提醒:请务必携带好您的身份证并佩戴好口罩前来参观)。


10大工作站群星集结
艾利特前沿产品实力出彩

大尺寸视觉检测工作站
Part.1方案介绍
本方案由艾利特全新EC64-19协作机器人与Mech-mind 3D视觉检测系统组成。EC64-19机器人专门针对大尺寸部件的视觉检测和摄影摄像应用而生,配合视觉系统完成大尺寸工件的检测和摄影摄像工作。
Part.2功能特点
艾利特EC64-19机器人工作半径达到1900mm,重复定位精度±0.05mm,负载能力4kg负载。基于EC64-19的视觉检测、摄影摄像系统能在不依赖外部轴的情况下,在半径1.8米的球形空间内从任意角度对产品进行全方位、快速、准确的视觉检测和拍摄。
Part.3应用场景
适用于各类中大型产品/部件的自动化检测、视频拍摄、视觉检测、3D扫描与建模等场景。
螺丝锁付工作站



Part.1方案介绍
本方案由艾利特全新的EC68-08协作机器人、力优螺丝枪及OnRobot送钉机组成,可以实时控制螺丝锁附扭矩并获得螺丝锁紧扭矩反馈值,实现锁付扭矩的精确控制。
Part.2功能特点
艾利特全新EC68-08工作半径820mm、负载8kg,专门面向螺丝锁付应用优化,具有负载大、加速快、刚性强的特点。机器人与力优螺丝枪通过RS-485通讯,实现锁付扭矩的实时控制。整套系统工作效率高、锁付扭矩精准,适合中小扭矩、大数量螺钉的锁付。
Part.3应用场景
车灯螺丝锁付、电池PACK螺丝锁付等各类螺丝锁付场景。
大负载码垛工作站

Part.1方案介绍
本方案由艾利特全新CS620机器人和钧舵EVS08电动真空吸盘组成。CS620机器人工作半径1800mm,负载20kg,工具I/O对外供电5A/120W,本体重量62kg,钧舵EVS08电动吸盘负载8kg,两者结合可满足20kg以下的码垛需求。
Part.2功能特点
艾利特CS620机器人运行速度比国外同类产品提高5%,比国内同类产品提高35%以上。配合艾利特码垛工艺包和钧舵EVS08电动吸盘,可高效完成1.2米x1.2米标准托盘、垛高1.8米的码垛需求,且不需要围绕机器人本体的外部线缆,可靠性、安全性进一步提高。
Part.3应用场景
适合于如码垛、机床管理、焊接、装卸物流等应用。
绘画机器人工作站

Part.1方案介绍
本方案由艾利特EC66协作机器人、摄像头及上位机构成。上位机通过相机得到图像并将图像轮廓转换为机器人轨迹数据、发送给机器人,机器人根据轨迹数据完成绘画工作。
Part.2功能特点
上位机根据相机图像自动识别、提取人脸轮廓,并使用机器人的SDK接口向机器人发送轨迹数据。机器人对接收到的轨迹数据进行实时样条插补,解决上位机轨迹数据不连续、通信延迟不可控的问题,确保绘画动作平稳柔顺,降低对上位机算法的要求。
Part.3应用场景
产品动态涂胶,焊接、切割等应用。
3D视觉涂胶工作站
Part.1方案介绍
本方案由艾利特CS66协作机器人和跨维智能的DexSense 3D工业相机、DexVision 3D工业视觉系统、工控机组成。DexVision 3D工业视觉系统对来料进行扫描并与标准样件数据进行对比,计算得到机器人轨迹数据,并通过Elite生态平台的DexVision专属插件发送轨迹数据给机器人、控制机器人运行。
Part.2功能特点
Elite CS系列具备强大的生态衍生能力,通过生态平台的插件系统,DexVision 3D工业视觉系统可以完全控制机器人的运行,结合艾利特控制系统优秀的运动控制能力,涂胶轨迹更精确、涂胶更均匀。
Part.3应用场景
适用于汽车、3C、新能源、加点、物流、化工等行业的涂胶应用、视觉检测等。
传送带跟踪工作站

Part.1方案介绍
本方案由2台艾利特EC63协作机器人及传送带组成。1台机器人上料,1台机器人跟踪传送带运动、抓取传送带上的物体。
Part.2功能特点
艾利特机器人基于外部编码器的传送带跟踪工艺包,可精准、快速跟踪传送带上的工件,并完成抓取等工作,跟踪精度可达±1mm。
Part.3应用场景
一般制造业中在输送线上需要动态完成相关工艺的场合,例如涂胶、视觉分拣等。
CS66上下料工作站

Part.1方案介绍
本方案由艾利特CS66协作机器人与海康相机、大寰PGE15夹爪构成,可以完成高效、精准的上下料动作。
Part.2功能特点
基于艾利特机器人的碰撞检测功能和灵活安装特性,狭小空间的高效柔性化上下料得以实现。
Part.3应用场景
机床上下料等。
复合机器人上下料工作站

Part.1方案介绍
本方案由艾利特EC612协作机器人和里工AMR组成,可以独立完成工件的物流运输到精确移载的整个任务,进一步提高了人工替代率。
Part.2功能特点
现场快速构建环境地图、自主规划导航路线、自主避障,机械臂与机床配合完成机床上下料及其他机床服务任务。协作机器人与AMR结合充分发挥各自优势,具备自主移动性、协作性和安全性,不仅适合流程型制造场景,也更适用于需要更多灵活性和智能化的离散型制造场景。
Part.3应用场景
金属加工行业、智能工厂、物流分拣、物流装卸
水果抓取工作站

Part.1方案介绍
本方案由艾利特CS63协作机器人和柔触柔性夹爪组成。夹爪由柔性材料制成,通过模拟人手的柔性抓取能力,同一爪手既可抓取不同外形的物体,也可抓取柔性、易伤、易碎物体。

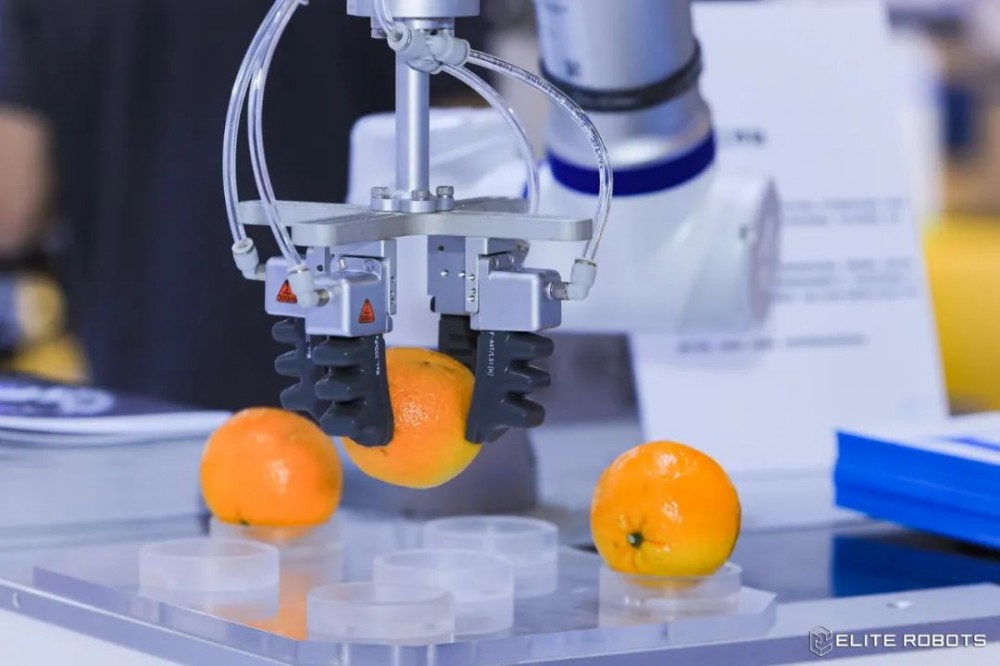
Part.2功能特点
不同于传统爪手的刚性结构,柔触柔指采用纯柔软材料制成,无刚性骨格,夹持力度可调,能够自适应地包覆住目标物体,无需根据物体精确的尺寸、形状进行预先调整,抓持动作轻柔,尤其适合抓取柔性、易损物体,摆脱了传统生产线要求生产对象尺寸均等的束缚。
Part.3应用场景
适用于包装、小型码垛、分拣取放、传送带等需要柔性抓取的场合
3D视觉检测工作站

Part.1方案介绍
本方案由艾利特CS66协作机器人和湾测WONSOR的SL-05150三维结构光相机、湾测视觉系统、工控机组成。将3D结构光相机安装在CS66末端上,对工件进行拍照定位后根据特征计算中心坐标,可进行高速扫描三维重建。
Part.2功能特点
艾利特CS66机器人重复定位精度±0.02mm、负载能力6kg,具备强大的生态衍生能力,通过生态平台的插件系统,WONSOR视觉系统可以完全控制机器人运行,对工件进行全方位、快速、准确的视觉检测和拍摄,满足不同应用场景的3D成像需求。
Part.3应用场景
锂电、半导体、3C电子等生产过程中的高度、段差、厚度测量,涂胶引导、零部件3D扫描与建模、零部件缺陷检测。

小艾同学
锁定展位A4042速围观!

有颜有趣,限定周边先到先得
有颜有趣,限定周边先到先得,机器人模型、三合一数据线、记事本、U盘、帆布袋......展位签到抽奖就有周边好礼领取,数量有限,先到先得!

好的文章,需要您的鼓励
0

- 最新资讯
- 最新问答
-
具身智能论坛+4天直播!机器人在线揭秘2025世界人工智能大会热门展位!
关键字: 2025-08-12 -
机器视觉黄金赛道!VisionChina 2025深圳机器视觉展携手NEPCON,为您开启16.5万精准买家商机
关键字: 2025-08-12 -
机器人在线回顾2025世界人工智能大会,AI赋能具身智能!
关键字: 世界人工智能大会 2025-08-01 -
机器视觉在机器人行业的应用(上)
关键字: 2025-08-04 -
WAIC 焕新之旅:卓益得多重突破启新程
关键字: 卓益得 2025-07-28
-
焊接机器人系统组成有哪些?
标签: 焊接机器人,机器人系统 提问:李子 2025-07-24 14:02:05 -
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00


- 2020-12-03 14:22:47
- 2019-05-20 17:07:08
- 2021-11-17 14:10:31
- 2018-06-04 15:54:18
- 2023-05-31 13:12:58
- 2023-05-25 17:16:38
- 2025-08-12
- 2025-08-12
- 2025-08-01
- 2025-08-04
- 2025-07-28
- 2025-07-21
- 2025-07-18
- 2025-07-18
- 2025-07-11
- 2025-07-09









