





新品发布 | 跨维智能推出基于3D大模型的高性价比拆垛产品

近日,跨维智能推出了面向拆垛类场景的 3D 视觉引导产品。随着工业自动化与物流技术的不断发展,如何使用自动化设备提高生产和物流效率,减少人工,成为当前行业最关心的问题。拆垛是其中自动化设备部署数量最多的应用场景之一,市场需求也正从示范应用向规模化普及发展,在工程机械、物流运输、电子商务、食品化工等行业中有非常普遍的落地。跨行业的规模化应用也对产品提出了更高的技术和成本要求,跨维智能 3D 视觉引导拆垛产品的推出,正是迎合了这样的市场需求。
在跨维智能自主研发的 3D 大模型的加持下,该产品大大提升了其在各类场景下的适用性,搭配主流工业机器人可以突破传统自动化拆垛方案的使用场景限制。传统方案往往要求人工进行大量的拆垛流程设计,需要保证栈板定位精准,拆码的货物规则、摆放整齐、不能有旋转形变等细微移动,以便机器人可以按照预设点位操作或者换算出抓取位置,这些点位的估计往往还存在精度和稳定性问题。得益于 3D 大模型的优势,跨维智能的 3D 视觉引导产品不仅解决了传统方案的各类问题,较同类产品还具备对来料多样性和来料自由摆放的适应能力。模型的通用性和软件的专业性,让使用该产品的集成交付团队无需二次开发即可轻松完成拆垛工作站的实施与部署,可轻松应对垛形复杂多变、箱体种类繁多等场景。
方案概述
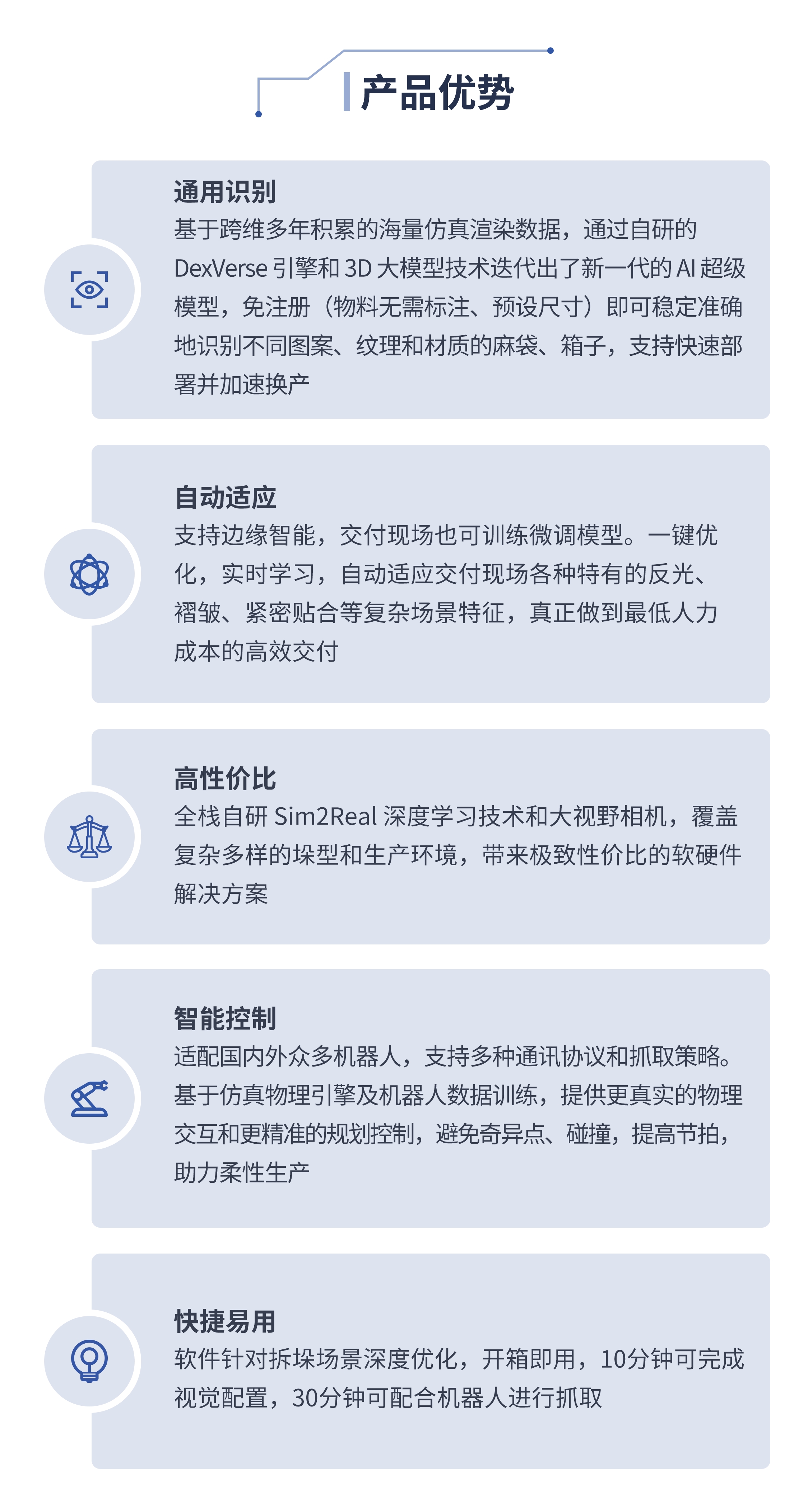
经过多年海内外项目的沉淀,跨维智能迭代出了稳定高效、极具性价比的新一代 3D 视觉引导拆垛产品。该产品采用跨维自研的 LUMOS-W 大视野高精度相机,利用先进的三维几何深度学习成像技术,全面覆盖复杂多样的垛型和生产环境。另外,跨维智能全自研的 DexVerse 引擎底座与 3D 大模型催生了基于海量仿真数据的模型开发新范式,基于新范式训练的拆垛超级模型可稳定识别不同种类、纹理、图案的麻袋和箱子。在拆垛方案的实施现场,松散、褶皱、紧密贴合的物料往往需要视觉引导产品厂商人工干预并提供定制化的解决方案,而跨维智能的创新拆垛产品可以通过边缘端的在线学习,自主快速地解决现场的上述问题,在业界基准上进一步提升拆垛精度。配套的 PickWiz 智取软件,已针对拆垛场景深度优化,实现了拆垛场景的特有功能,兼顾了易用性和机器人的适配通用性,轻松上手,实现高效交付,大幅降低了集成过程中的人工成本。

该产品中使用的跨维自研的 LUMOS-W 大视野高精度相机,兼具高精度、大视野等特点,相机工作距离可达到1100-3500mm,定位精度达到±0.25mm,可轻松适配1.2m*1m*1.8m等主流垛形。同时具备极高的稳定性和节拍速度,视觉节拍(从机器人触发软件拍照,到软件返回机器人抓取点)小于3S。

为了能让用户自主高效地搭建 3D 视觉引导拆垛系统,跨维智能提供了 3D 视觉引导软件 PickWiz。软件内含图形化、无代码的操作界面,大大降低了视觉软件的上手难度,并且针对拆垛场景做了大量的简化设计,仅需配置部分参数即可实现视觉识别。软件内置AI算法以及深度学习能力,在仿真空间中模拟多样化场景,生成大量合成数据,利用这些数据训练得到的深度学习模型可轻松识别可各种垛形、纹理、材质的麻袋和纸箱。此外,软件适配国内外各种主流品牌机器人,支持 TCP、MODBUSTCP 等多种通讯协议。

落地客户案例
某大型烟草厂| 3D视觉引导纸箱拆垛

项目优势:
基于跨维智能自研的 DexVerse 引擎和 3D 大模型技术迭代出的新一代Al 超级模型,免注册即可稳定准确地识别不同尺寸、纹理和材质的箱子,快速部署并加速换产
跨维智能 PickWiz 抓取软件针对拆垛场景深度优化,可实现开箱即用,10分钟可完成视觉配置,30分钟可配合机器人进行抓取
支持边缘智能,交付现场也可训练微调模型。一键优化,实时学习,自动适应现场褶皱、箱体紧密贴合的场景,真正做到低成本高效交付
项目效果:
该项目采用跨维智能 LUMOS-W 相机+跨维智能 PickWiz 抓取软件+ 机械臂,实现自动化拆垛,生产效率提高70%,人工成本从8人降低至1人。
某大型日化生产厂| 3D视觉引导混合纸箱拆垛
项目背景:在现代物流和制造业中,纸箱的拆垛操作是一项重要且频繁的任务。传统的纸箱拆码垛工作通常由人工完成,这种方式存在劳动强度大、生产效率低以及人为操作容易导致错误等问题,严重影响物料的安全运输和质量。

项目优势:
基于跨维智能 DexVerse 引擎和 3D 大模型训练的超级模型,系统可以根据不同尺寸、形状和堆码要求适应不同类型的货物,具有较强的灵活性和适应性
视觉系统具有良好的泛化能力,针对新增型号系统只需进行简单的调试即可完成适配,帮助工厂加快生产节奏
内置机械臂通用通信程序,结合机器人仿真物理引擎和规控算法,实现精准安全的运动控制,可有效应对现场空间紧凑、干涉严重(滞留托盘、相机支架等)等问题,提升运行稳定性
项目效果:
使用 3D 视觉引导拆垛产品后,大大提高了纸箱拆码垛的操作速度,提高了生产效率,满足了大规模生产和物流的需求。同时,使用标准化拆垛产品也降低了人工操作的安全隐患。
除上述行业应用外,跨维智能的拆垛方案还曾广泛应用到了麻包袋拆垛、纸箱拆垛、料筐拆垛、机器人供包等不同场景中,覆盖了汽车零部件、化工、食品饮料、物流等众多行业,赋能智能制造。


好的文章,需要您的鼓励
16

- 最新资讯
- 最新问答
-
极致清晰!海康机器人发布2.45亿像素XoFLink光口相机
关键字: 海康机器人 2024-12-05 -
MiR 发布 MC600 移动协作机器人, 以高负载精密协作技术重塑工业生产模式
关键字: 名傲移动机器人 2024-12-03 -
“机器人关节”被TA硬控了
关键字: 美的工业 rv减速机 2024-10-16 -
新品解读 | 行业颠覆性JAKA MAX系列,首发负载40kg
关键字: 节卡 协作机器人 新品 2024-10-11 -
兼顾极小码与大景深,超耐用手持读码器IDH9000全新上市
关键字: 海康 读码器 新品 2024-09-19
-
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00

跨维(深圳)智能数字科技有限公司
 3年
3年



- 2024-04-24 10:53:29
- 2024-07-15 09:49:06
- 2022-03-23 13:58:19
- 2024-06-28 13:56:28
- 2024-06-27 13:30:07
- 2024-07-22 17:23:41
- 2024-12-05
- 2024-12-03
- 2024-10-16
- 2024-10-11
- 2024-09-19
- 2024-09-13
- 2024-09-12
- 2024-09-05
- 2024-09-05
- 2024-09-04









