




SCARA机器人运动学仿真分析 下

在实际应用过程中,STEP函数有两种表示方式:
一种是嵌入式,其函数形式可记为:
![]()
另一种是增量式,其函数形式可记为:
![]()
以上两种方式都可以达成预定的驱动效果,但值得注意的是:每个STEP函数都是从零开始产生渐变,因此每一个STEP函数都是相对于上一次运行结果的累加计算,除非输入新的STEP函数,否则模型机构将在之后的仿真过程中一直保持上一个STEP函数的渐变结果。
本文中采用的是增量式的表示方式,以多个步骤的叠加来表示整个运动过程,通过对SCARA机器人运动过程的分析,可将其在一个完整周期内的运动情况分析如以下六个步骤:
步骤一:SCARA机器人运动到初始位置,其初始位置设为被抓取工件的上方;
步骤二:抓手伴随着升降台下降,闭合抓手,抓取工件;
步骤三:抓手伴随着升降台升起,通过软件分析计算,在机器人的大臂和小臂转动下,运动到工件待放置区域的上方;
步骤四:抓手伴随着升降台下降,抓手通过电机的旋转调整相应的位姿,抓手张开,松开工件;
步骤五:抓手伴随着升降台上升,通过软件分析计算,在机器人的大臂和小臂转动下,运动到初始位置;
步骤六:抓手通过电机的旋转调整相应的位姿,恢复初始状态,完成一个运动周期。
根据SCARA机器人工作过程中运动情况,参考各零部件的基本尺寸数值,分别选取合适的移动量(用角度或者位移表示),最终将各驱动机构的STEP驱动函数设置如下:
大臂:
![]()
即在20s至25s时间内,大臂的角位移由0变化为pi/3,在40s至45s时间内,大臂的角位移由0变化为-pi/3,其他时间均保持不变。
小臂:
![]()
即在20s至25s时间内,小臂的角位移由0变化为pi/6,在40s至45s时间内,小臂的角位移由0变化为-pi/6,其他时间均保持不变。
Z轴升降台:
![]()
![]()
![]()
即在0s至5s时间内,z轴升降台的位移由0变化为0.35,在5s至10s时间内,Z轴升降台的位移由0变化为-0.65,在15s至20s时间内,Z轴升降台的位移由0变化为0.65,在25s至30s时间内,Z轴升降台的位移由0变化为-0.65,在35s至40s时间内,Z轴升降台的位移由0变化为0.65,其他时间均保持不变。
腕部:
![]()
即在20s至25s时间内,腕部的角位移由0变化为pi/2,在40s至45s时间内腕部的角位移由0变化为-pi/2,其他时间均保持不变。
抓手:
![]()
![]()
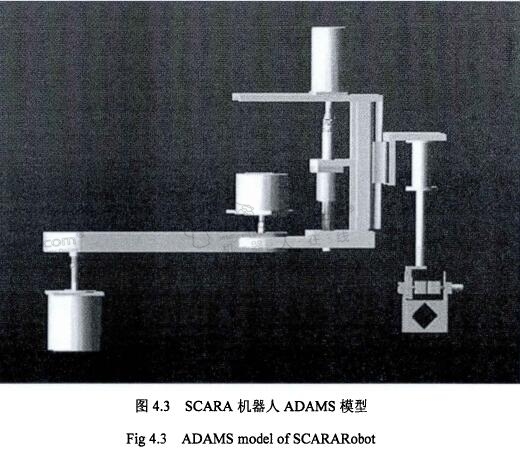
即在0s至5s时间内,抓手的位移由0变化为-0.08,在10s至15s时间内手的位移由0变化为0.08,在30s至35s时间内,抓手的位移由0变化为-0.08他时间均保持不变。添加完相应的约束和驱动后,SCARA机器人的ADAMS模型如图4.3所示:
仿真结果的后处理
选取合适的参考点,使用ADAMS的测量功能,可以跟踪绘制仿真过程中感兴趣变量的变化曲线图,得到一些有关机器人抓手末端的位移、速度、受力等信息,便于跟踪了解仿真分析过程。在本设计中,选定机器人安装底座为参考坐标点,基于SCARA机器人模型上设置的若干marker点进行测量,测量对象为机器人抓手末端在X, Y, Z, Mag四个方向上所产生的位移和速度变化情况。
检查模型无误后,方可对SCARA机器人三维模型进行仿真分析,将停止时间设为50s,步数设500,即每隔0.1s输出一次仿真结果,实时观察机器人各部分在工作中过程的运动情况。
通过仿真测量,获得SCAR.A机器人不同方向上位移变化如图4.4所示。
.jpg)
.jpg)
.jpg)
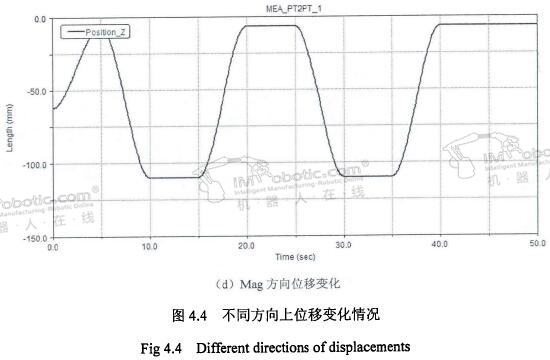
如图4.4所示,通过分析可以看出,模型仿真结果与实际工作情况相吻合,当抓手呈水平伸长状态时,机器人抓手末端在X方向上的最大位移为550mm,最小位移为150mm;在Y方向上的最大位移为500mm,最小位移为20mm; Z方向上抓手运动的最高点位置为110mm,最低点位置为6mm;抓手末端距参考点总位移最大值为571 mm,最小值为519mm。同时,在经过一个完整的运动周期后,大臂,小臂,手腕和手抓各部分结构的位移变化量均为零,即SCARA机器人回到初始位置,等待进入下一个运动周期。
通过进一步分析可知,SCARA机器人工作的一个完整周期内,在X轴方向上,抓手末端在大臂小臂转动、腕部调整位姿及抓手开合过程中均有位移的变化;在Y轴方向上,抓手末端在大臂小臂转动及腕部调整位姿过程中有位移的变化,而抓手开合对Y轴方向位移并无影响作用,并且升降台的上下运动对机器人在X方向和Y方向上的位移均无影响;在Z轴方向上,抓手末端仅在升降过程中有位移的变化,且Z轴工作台的导轨量程为120mm,Z轴方向上的运动位移符合运动范围。
为了进一步对仿真进行分析,通过仿真测量,获得SCAR.A机器人不同方向上的速度变化如图4.5所示。
.jpg)
.jpg)
.jpg)
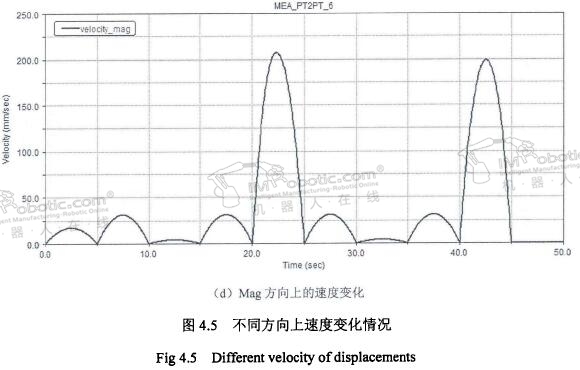
如图4.5所示,通过分析可以看出,在各方向上的速度变化情况与位移变化情况相似,由于在设置驱动函数时,使用位移变化量作为驱动,故而在运动过程中的速度变化较大。SCARA机器人工作的一个完整周期内,在X轴方向上,抓手末端在大臂小臂转动、腕部调整位姿及抓手开合过程中均有速度的变化;在Y轴方向上,抓手末端在大臂小臂转动及腕部调整位姿过程中有速度的变化,而抓手开合时Y轴方向并无速度变化,并且升降台的上下运动时,机器人在X方向和Y方向上的速度均不产生变化;在Z轴方向上,抓手末端仅在升降过程中有速度的变化。
最后,进入ADAMS后处理模块,单击左上角处理类型下拉列表中选择Animation,在动画区单击鼠标右键,选择Load Animation,在播放的同时按下按钮R,输出仿真视频。点击File->print->进入print界面,点File单选按钮,nativewindows下拉列表中选jpg格式,单击ok,保存图片到工作目录下,导出仿真测量结果,获得SCARA机器人不同方向上的位移变化如图4.4所示。
在ADAMS/Post Processor中,点击File→Export→Table,使用Table方式导出数据,在File Name中指定文件名称。相比较于另外两种导出数据的方式:NumericData和Spreadsheet ,Table方式的特点使仅将用户所需要的那组曲线数据导出,可以通过在Plot中选定需要输出的曲线,即可获得所需数据。

好的文章,需要您的鼓励
6

- 最新资讯
- 最新问答
-
协作焊接机器人有哪些特点?优势是什么?
关键字: 协作机器人 焊接机器人 2025-08-13 -
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24
-
焊接机器人系统组成有哪些?
标签: 焊接机器人,机器人系统 提问:李子 2025-07-24 14:02:05 -
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2023-04-12 18:24:02
- 2023-05-02 21:14:05
- 2023-05-08 17:22:00
- 2022-12-01 14:01:36
- 2023-02-02 10:09:54
- 2022-08-03 10:20:40
- 2025-08-13
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19









