





喷涂机器人静态漆膜堆积模型的生成

在现场实际生产中,喷涂机器人通常当静电喷枪不移动时,由于静电场和喷枪成型空气的双重作用,平面上的涂料的静态空间分布为环形。如图3.2(a)所示。环形的外直径为D1,内直径为D2。根据工程上的统计数据,随着静电电压的变化,涂料静态空间分布的内外径也会发生变化。其变化关系如图3.2(b)、(c)所示。
.jpg)
所以根据实际的生产工艺的要求,首先可以利用辅助CAD软件设计出一个期望态漆膜圆环的截面曲线,或者可以直接在现场工艺参数的条件下利用红外测绘仪器获得漆膜圆环的截面实验曲线。
这时会出现一个问题,通常情况下没有曲线的函数表达。借鉴了CAD逆向工程和点云数据提取技术。我们首先将曲线进行一次离散化,从而得到所需初始数据点云集P。假设初始数据点有n个,以静态漆膜模型圆环的圆心定义为笛卡尔坐标系的原点则有:
![]()
以合作汽车企业西南生产基地(重庆)中涂流水线现场采集的初始数据点集作为原始数据。可以得到初始静态漆膜截面离散点云数据。如表3.1所示。
.jpg)
将上表3.1中每个点的笛卡尔坐标系横坐标(即漆膜截面的径向距离)以及纵坐标(即漆膜截面厚度)分别提取,组成两个向量Xp和Yp,则有:

进一步利用上述两组向量进行高次多项式拟合,得到漆膜环截面曲线的多项式拟合函数:
![]()
而这个拟合函数也可以近似认为是漆膜截面包络曲线的近似拟合。利用3.2式得到静态漆膜圆环的径向截面拟合曲线。如图3.4所示。
.jpg)
根据涂装生产工艺,一般静态堆积漆膜截面的径向距离通常有几百毫米,而其堆积厚度却只有十微米左右。这就意味着Xp和Yp的数量级相差很大。如果这时我们直接进行CAD重构,那么将会得到一个环形的薄片,使漆膜厚度指标的视觉化效果不佳。所以需要对3.2式拟合曲线进行二次离散提取,得到:
.jpg)
其中,Kx是径向距离比例调节系数,ky是纵向厚度比例调节系数。
进一步的,可以构建漆膜三维成像扫描矩阵:
其中,![]() K为像素系数矩阵。
K为像素系数矩阵。
至此得到了包含漆膜静态模型所有数据信息的广义矩阵M:
.jpg)
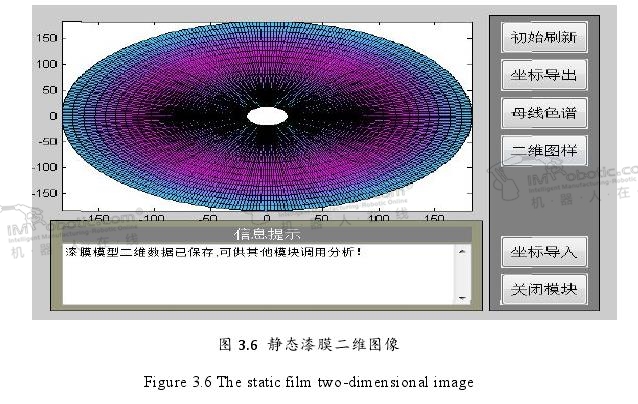
由此,利用3.4、3.5、3.6、3.7式,可以在软件平台上构建出拟合的漆膜的
CAD模型,构建模型效果如图3.5所示

同时将生成的CAD图像数据导出保存,供后续模块提取分析,其模块操作界面如图3.6。

好的文章,需要您的鼓励
10

- 最新资讯
- 最新问答
-
埃斯顿机器人系列有哪些?怎么样?
关键字: 埃斯顿 埃斯顿机器人 系列 2024-07-05 -
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25
-
工业机器人技术是干什么的?
标签: 工业机器人,技术 提问:小杰 2024-07-03 13:03:15 -
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
- 2024-07-05
- 2024-07-03
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11









