





喷涂机器人喷涂模型与离线编程关键技术研究软件平台分析结果

由3.4节最后的3.11式和3.12式讨论结果,在Matlab平台上通过改变静态漆膜采样间隔hl和喷涂样条叠加范围h2,可以得到不同的喷涂平面矩阵A。而根据采样时间可以方便的把hl折算为当前的机器人运动速度V,得到表3.2如下。表格中数据区采用色素样本的均值来对应描述最终的漆膜平均厚度(单位um)。
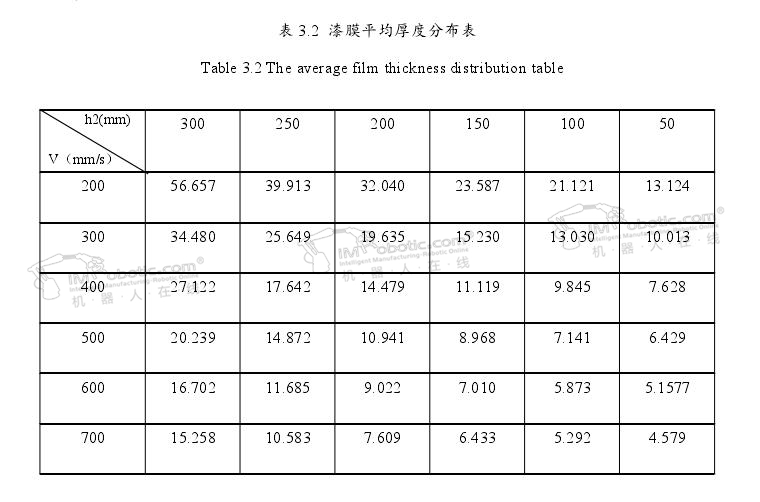
在考察喷涂漆膜平均厚度和均匀度这两个指标时,漆膜厚度J可以通过喷枪流量Q,喷涂时间T(机器人喷枪运动速度V)以及喷涂面积S计算获得。事实上其计算结论与表3.2反应的结论是一致的。因此下面重点考察漆膜的均匀度。
清华大学的陈雁在对喷涂质量中的另一个重要指标一一涂层的均一性进行研究时发现:影响喷涂涂层均匀性的一个重要因素是机器人喷涂轨迹的叠加区域范围。并通过最优制原理建立优化目标泛函,利用涂层采样方差作为涂层均匀度的评估标准。初步研究了机器人喷涂轨迹叠加带与喷涂质量的关系。这对于本章节中关于静电喷涂机器人的喷涂漆膜模型仿真分析很有启发。
进一步的,利用3.12式喷涂平面矩阵A的灰度色素的采样方差可以评价喷涂漆膜的均匀度。显然,漆膜的灰度色素方差值越小则表示漆膜的分布越均匀。由之前引用文献可知,漆膜的均匀度(光洁度)主要受到喷涂机器人待规划轨迹的间距L的影响。其数量关系如图3.13所示。
.jpg)
图中纵坐标为灰度像素采样方差,横坐标为喷涂轨迹的规划间距。
这里对轨迹间距L分别取值50mm?,150mm以及230mm,分别观测在不同L值下的喷涂效果,如下图3.14(a)、(b)、(c)所示。
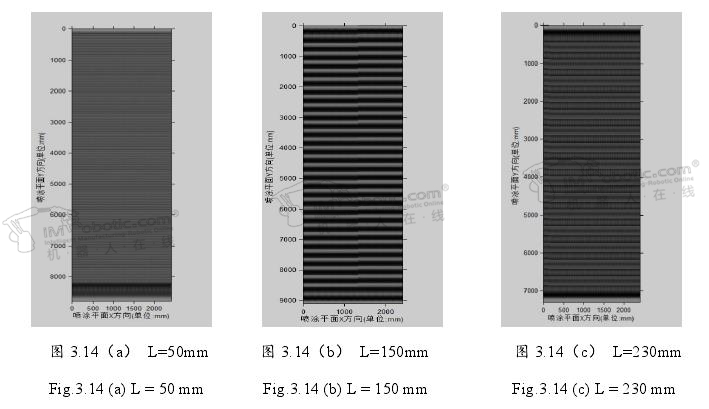
显然,从图3.14中可以看出L=50mm时漆膜均匀度最佳,L=230mm时次之,而L=150mm时最差。这明显与图3.13中反映的结论是一致的。
另一方面,规划轨迹间距L越大则喷涂效率越高。实际上机器人喷枪的轨迹优化是漆膜光洁度与喷涂效率的多目标优化问题。往往是在保证较高喷涂效率的条件下,再以获得最好的漆膜光洁度为目标;或在满足漆膜光洁度的前提下,争取获得较高的喷涂效率。
这就涉及到了多目标优化的问题,可以根据现场工艺指标的侧重不同而进行灵活的调整和设置来优化主要指标。
最后,结合上述的讨论结论和预测参数,结合科研项目合作企业喷涂作业项目要求,在RobStudio平台上对ABB喷涂机器人IRB5500进行离线编程仿真。大大提高了机器人的离线调试效率。这一部分将在下一章中详细展开讨论。同时生满足工艺要求的前提下,合理规划喷涂轨迹分布,有效提高了喷涂流水线的生七节拍和产量。在企业实际生产中得到了很好的运用,如下图3.15所示。
.jpg)

好的文章,需要您的鼓励
11

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









