





喷涂机器人轨迹自编程系统软件的开发与实验研究
时间:2017-08-17
阅读:8310

第5章喷涂自编程系统软件的开发与实验研究
5.1引言
和离线轨迹规划系统相类似,自编程软件系统结合逆向工程技术、点云处理技术以及机器人技术的应用,利用计算机仿真技术,采用三角网格划分和点云切片技术进行喷涂轨迹规划,并可以通过人机交互的方式,在虚拟的软件系统中,对喷涂机器人的喷涂路径进行规划与优化,并且能够进行可视化的软件系统。本章在Visual Studio 2013的开发环境下,采用MFC, OpenCV, PCL以及C++和Matlab的混合编程技术,实现了前面章节所有的相关算法,设计并开发了系统而又全面的具有三维可视化功能的喷涂机器人自编程软件系统,该系统能够针对多品种不同工件生成优化的机器人喷涂路径,还可以通过可视化进行人机交互,最后直接生成机器人能够识别和执行的机器人程序文件。
5.2日责涂自编程系统分析
5.2.1系统功能分析
本课题对机器人的喷涂自编程技术展开研究,旨在解决基于工件点云模型的喷涂机器人自编程轨迹规划的问题。主要功能是针对航空航天、汽车和军事领域等行业中的喷涂工件,通过Kinect 2.0获取工件的点云模型,利用点云处理技术对工件三维信息进行处理加工,再建立有效的喷涂模型,结合相关约束条件和优化目标对喷涂参数进行优化,然后使用路径规划算法自动生成喷涂路径,并能可视化显示路径规划结果。
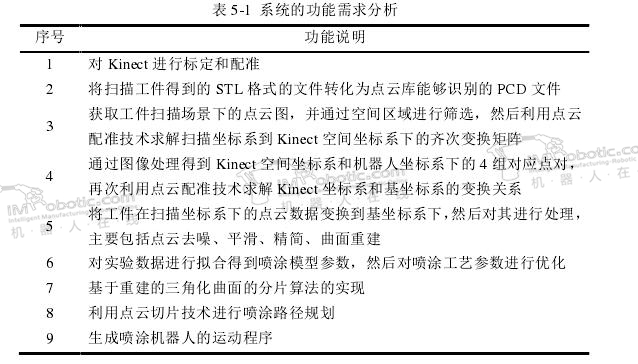
通过对课题研究目标的分析,可以确定在自编程软件系统中,需要实现的功能主要有三个:一是工件三维信息的处理;二是喷涂工艺参数优化;三是喷涂路径规划。由于工件的三维信息是通过微软公司的Kinect和3D scan软件直接获取的,因此自编程系统中首先要解决的是对于工件原始点云数据的处理,包括点云去噪、平滑、精简、曲面重建。喷涂工艺参数优化是根据对喷涂过程的建模,通过实验数据进行拟合得到涂料在工件表面累计速率的实际模型,然后结合喷涂约束条件和优化目标,对喷枪行程间距和喷涂速度进行优化。喷涂路径规划是在对工件三维信息处理和喷涂参数优化的基础上,根据工件模型的特征,采用点云切片技术获取优化的喷涂路径并生成机器人执行程序的过程。此外,自编程软件系统还需要利用三维可视化的显示,来确定每个模块所达到的效果,便于通过人机交互的方式不断进行参数调整。因此,最终确定了本系统的功能需求如表5-1所示。

喷涂机器人
基于点云切片技术的喷涂机器人自编程技术研究
技术干货

好的文章,需要您的鼓励
1

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









