




面向超大船体外表面的喷涂机械臂研究中机械臂轨迹控制
时间:2017-08-23
阅读:7312
原创

5.4.1轨迹控制原理
喷涂机器人的轨迹追踪控制是实现机械臂末端对输入位置指令的准确追踪,以位置量作为控制系统的输入指令,利用编码器返回的脉冲数,经计算转换为电机转动的角度,与输入位置指令构成位置闭环;对电机转动角度进行微分,得到电机实际转动速度,与输入位置指令经过PI环节后的参考速度构成速度闭环,从而实现电机的位置伺服控制。单关节的位置伺服控制原理如图_5-8所示。
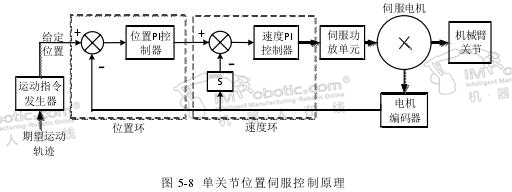
从图_5-8可以看出,机械臂的位置环采用PI控制,速度环采用PI控制,在进行电机调试时选择合适的PID参数,实现电机对输入指令的良好追踪。
5.4.2轨迹控制实验
为了检测各关节电机对位置追踪的效果,规划机械臂末端以15mm/s的速度从点(-1562.8,-1095.29,657.6287)沿直线运动运动到点(1639.7567,-1110.9966,863.4517),利用激光跟踪仪测量机械臂末端实际所走路线采样点,获得机械臂在运动过程中末端理论位置与实际采样位置,如图_5 -9所示。
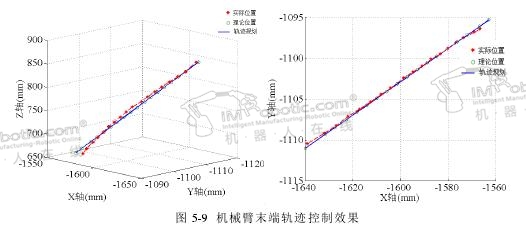
给定机械臂轨迹运动指令后,机械臂末端按照给定指令进行运动,在运动过程中实时监测机械臂末端实际位置,由此获得各个采样点的机械臂末端实际位置,以机械臂末端在采样点的实际位置与理论位置的偏差来作包含所有误差点的球面,则球体的半径就是最大轨迹跟踪误差。从而获得机械臂末端进行直线运动时,实际轨迹跟踪的最大误差为±0.5mm。
5.5喷涂机械臂系统实验研究
5.5.1喷涂机械臂系统
根据机械臂的性能指标所研制的轻量化喷涂机械臂样机外观如图_5-10所示,该机械臂由6个旋转关节、各关节连杆、末端喷枪及控制系统电器柜等组成。机械臂重量为150Kg,大臂小臂完全伸展高度为2.2 m,通过在机械臂末端悬挂祛码的方式,测得机械臂末端最大负载15 kg,末端运动速度1. 5 m/s,均满足设计要求。
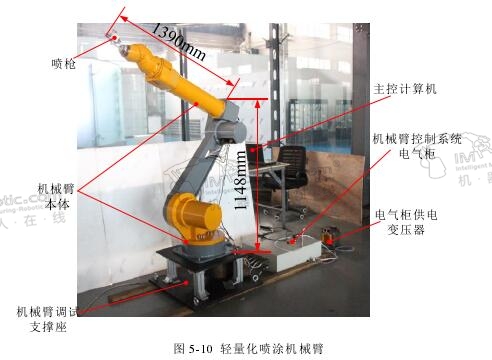
喷涂机器人整个喷涂机械臂系统由机械臂临时支撑座(调试完毕后安装于机械臂与液压展臂接口模块)、机械臂本体、喷枪、机械臂控制系统电气柜、供电变压器。主控计算机组成。

喷涂机器人
面向超大船体外表面的喷涂机械臂研究
技术干货

好的文章,需要您的鼓励
8

- 最新资讯
- 最新问答
-
协作焊接机器人有哪些特点?优势是什么?
关键字: 协作机器人 焊接机器人 2025-08-13 -
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24
-
焊接机器人系统组成有哪些?
标签: 焊接机器人,机器人系统 提问:李子 2025-07-24 14:02:05 -
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
栏目推荐
- 2025-08-13
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19









