





面向小曲率曲面的喷涂机器人喷涂轨迹规划中绪论(下)

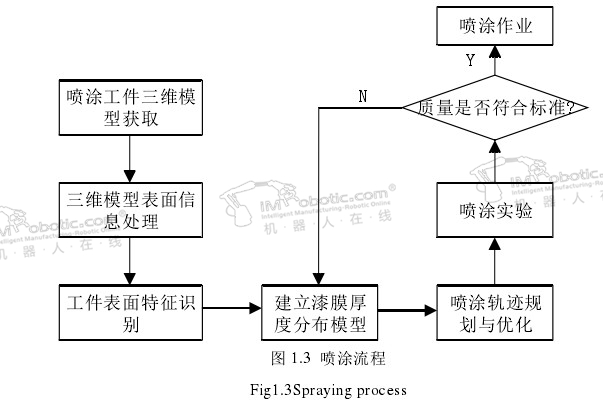
自动化喷涂系统工作时首先通过三维扫描仪获取喷涂工件表面信息;然后利用计算机图形学技术提取并处理工件三维模型表面信息,将工件坐标系与机器人坐标系进行匹配;最后通过数学算法对工件表面进行喷涂轨迹规划与优化,实现自动化喷涂作业。喷涂机器人自动化喷涂流程图如图1.3所示:
①改善了工作人员的工作条件,避免喷涂工人身体受到伤害;
②涂料得到了合理的利用,提高了喷涂质量、生产效率、减少了对环境的污染;
③快速完成新产品的喷涂任务,降低了喷涂周期,快速响应市场需求。
漆膜厚度分布模型与喷涂轨迹规划及优化技术作为自动化喷涂系统中研究的重点与难点,近三十年来,国内外研究者先后对喷涂机器人喷枪模型、轨迹规划与优化算法展开了研究,并取得了一定的成果。随着工业自动化的发展以及人们审美观的提高,客服对产品外形的美观提出了更高的要求,因此,越来越多的产品带有更多复杂的特征,如油箱表面、飞机表面、涡轮叶片表面等,而之前的喷涂模型和轨迹规划及优化算法大部分都是针对平面或者规则曲面的,因此无法满足目前复杂喷涂作业的要求。为达到高质量喷涂效果、追求高效率低成本的生产目标,研究新的漆膜厚度分布模型与喷枪轨迹规划及优化算法己成为国内外学者研究的热点和难点。
1.2国内外研究发展与现状
1.2.1国外研究现状
近几十年来,随着智能制造技术的不断发展,对喷涂机器人自动化程度也提出了更高的要求。漆膜厚度分布模型与喷涂轨迹规划及优化作为自动化喷涂系统的关键技术,研究者们进行了系统性的研究,经过大量的喷涂实验研究并取得了一定的成果:
1984年,McAuto集团成功研发出四套用于机器人的模块:PLACE, BUILD,COMMAND, ADJUST,利用这些模块可以实现实际喷涂的周围环境及喷涂过程的再现,第一次实现了示教喷涂。1993年,Suk-HanSuh等针对喷涂机器人成功研发出一套机器人自动喷涂系统(IRPS),第一次实现了喷涂机器人自动化离线编程,为喷涂机器人自动化的发展奠定了良好的基础。1993年,W. Persoons和H. VanBrussel基于CAD模型推测大曲率曲面的漆膜厚度分布模型服从高斯分布(如图1.4所示),其漆膜厚度分布函数即高斯分布表达式为:

1994年,J.K. Antonio等人对平面进行喷涂实验,通过分析实验数据建立了更为符合实际喷涂作业的喷涂模型即有限范围模型,并研究了平面上的喷涂轨迹规划方法,平面漆膜厚度分布函数表达式为:

喷涂机器人2004年,W. Sheng等人对复杂曲面上的自动喷涂轨迹规划与优化算法展开了初步的研究。2009年,H. Chen等人首次提出基于网格化CAD模型的喷涂轨迹规划与漆膜厚度分布模型的建立方法,但网格化的CAD模型特别是复杂曲面其边缘特征很难被识别。2012年,H. Chen等人对工件表面网格化CAD模型进行分片处理,提出片与片之间的连接算法并验证了算法的有效性。2015年,M. V.Andulkar 等人提出了增量式离线喷涂轨迹规划算法,并对喷涂速度、漆膜重叠宽度进行优化,提高了漆膜厚度分布的均匀性。


好的文章,需要您的鼓励
18

- 最新资讯
- 最新问答
-
埃斯顿机器人系列有哪些?怎么样?
关键字: 埃斯顿 埃斯顿机器人 系列 2024-07-05 -
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25
-
工业机器人技术是干什么的?
标签: 工业机器人,技术 提问:小杰 2024-07-03 13:03:15 -
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
- 2024-07-05
- 2024-07-03
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11









