





面向小曲率曲面的喷涂机器人喷涂轨迹规划中点云法向预平滑及邻域优化

2.4.3点云法向预平滑及邻域优化
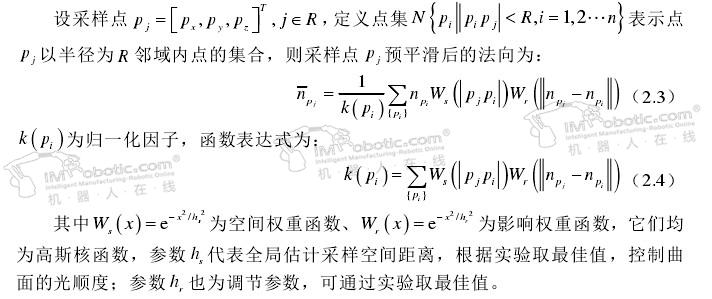
喷涂机器人虽然PCA算法获得了点云的法向信息,但通过计算获得物体表面三维点云鱿法向信息精度不高,不能将其直接运用到喷涂轨迹规划中,在获得点云的法向信息后,需要对其进行预处理获得更为合适的点云法向信息。因此,本文在PCA报术基础上引入双边滤波降噪的方法对点云法向进行预平滑处理。
2.4.4点云降噪处理
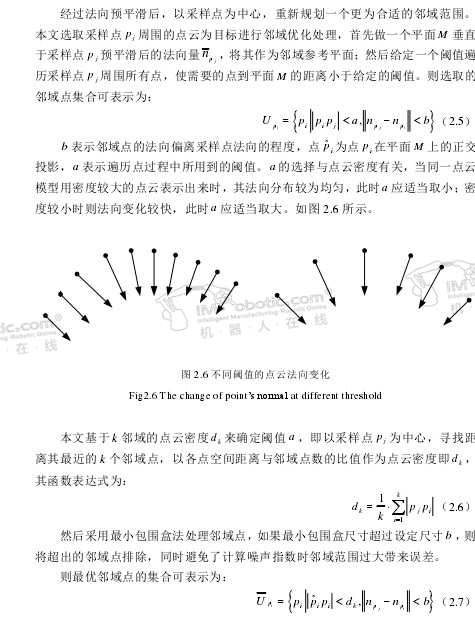
通过上述方法得到的最优化邻域点集包含了部分噪声点,因此本章基于最优邻域内的点云数据提出了一种点云降噪算法。
如图2.7所示,用二维示意图来表示最优邻域内点云的三维分布,可见噪声点
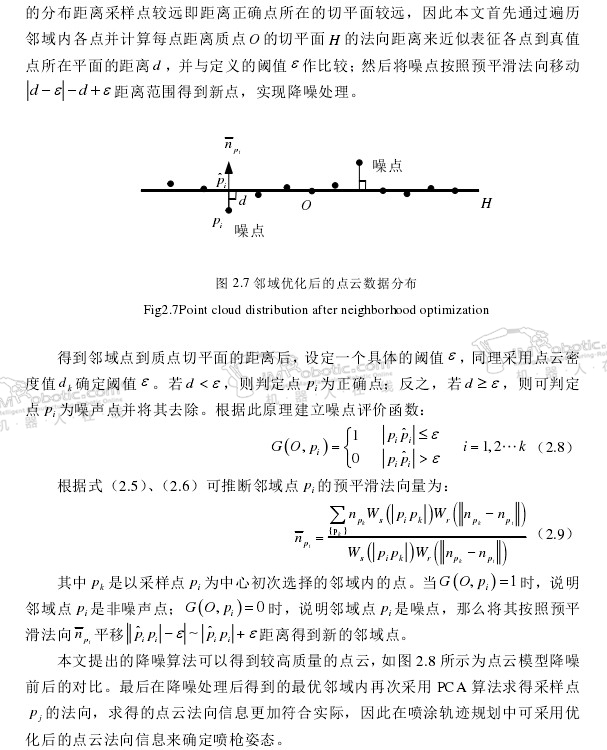

如图2.8中所示为汽车油箱点云模型降噪前后的对比图,从图中可以观察到油箱点云模型经过处理后的点云排列更加有序,曲面重构后的表面更加光顺,达到了降噪的目的。排列有序的点云数据有利于更好的识别特征,根据特征点云便可建立相应的漆膜厚度分布模型。
2.5点云特征识别
在实际喷涂作业中,喷涂工件表面形状通常由多种曲面组合而成,如平面、二次曲面、小曲率曲面等。因此,在自动化喷涂轨迹规划中必须自动识别工件表面每一处的特征,针对不同形状特征采用不同的漆膜厚度分布模型以及执行不同的喷涂轨迹规划方法。
在2.4节点云降噪处理过程中我们己经通过PCA算法获得了点云的法向信息,基于此本文根据点云法向信息分割点云模型并识别各面片的特征。

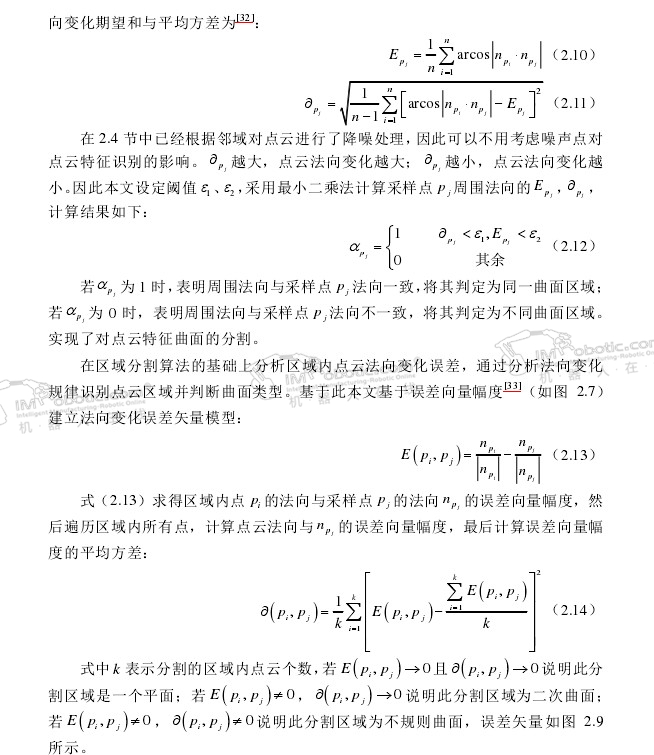
此算法可以快速、精确的识别点云特征,并根据识别结果确定曲面类型。在自动化喷涂轨迹规划中,根据识别的曲面类型采用合适的漆膜厚度分布模型以及执行合理的喷涂轨迹规划方法。
2.6本章小结
喷涂机器人本章分析了工件表面点云数据的获取技术,并结合实际情况采用华中科技大学的PowerScan系列的面结构光三维扫描仪采集工件表面三维数据信息;分析点云数据降噪处理算法,提出了基于PCA法向优化的降噪算法;基于获取的点云法向信息引用误差向量幅度算法对点云特征进行识别,为开展工件表面特征曲面的漆膜厚度分布模型的建立与喷涂轨迹规划及优化奠定了基础。


好的文章,需要您的鼓励
17

- 最新资讯
- 最新问答
-
埃斯顿机器人系列有哪些?怎么样?
关键字: 埃斯顿 埃斯顿机器人 系列 2024-07-05 -
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25
-
工业机器人技术是干什么的?
标签: 工业机器人,技术 提问:小杰 2024-07-03 13:03:15 -
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
- 2024-07-05
- 2024-07-03
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11









